バージョン情報
AXIS Radar Data Visualizerは、180°レーダー検知と180°パノラマ画像を組み合わせて大規模なオープンエリアを監視するアプリケーションです。レーダーとパノラマカメラを接続することで、検知距離が延びます。
AXIS D2110-VE Security Radar:
人物: 最大60メートル (200フィート) まで
車両: 最大85メートル (280フィート) まで
AXIS D2122-VE Radar:
人物: 最大100メートル (330フィート) まで
車両: 最大140メートル (460フィート) まで
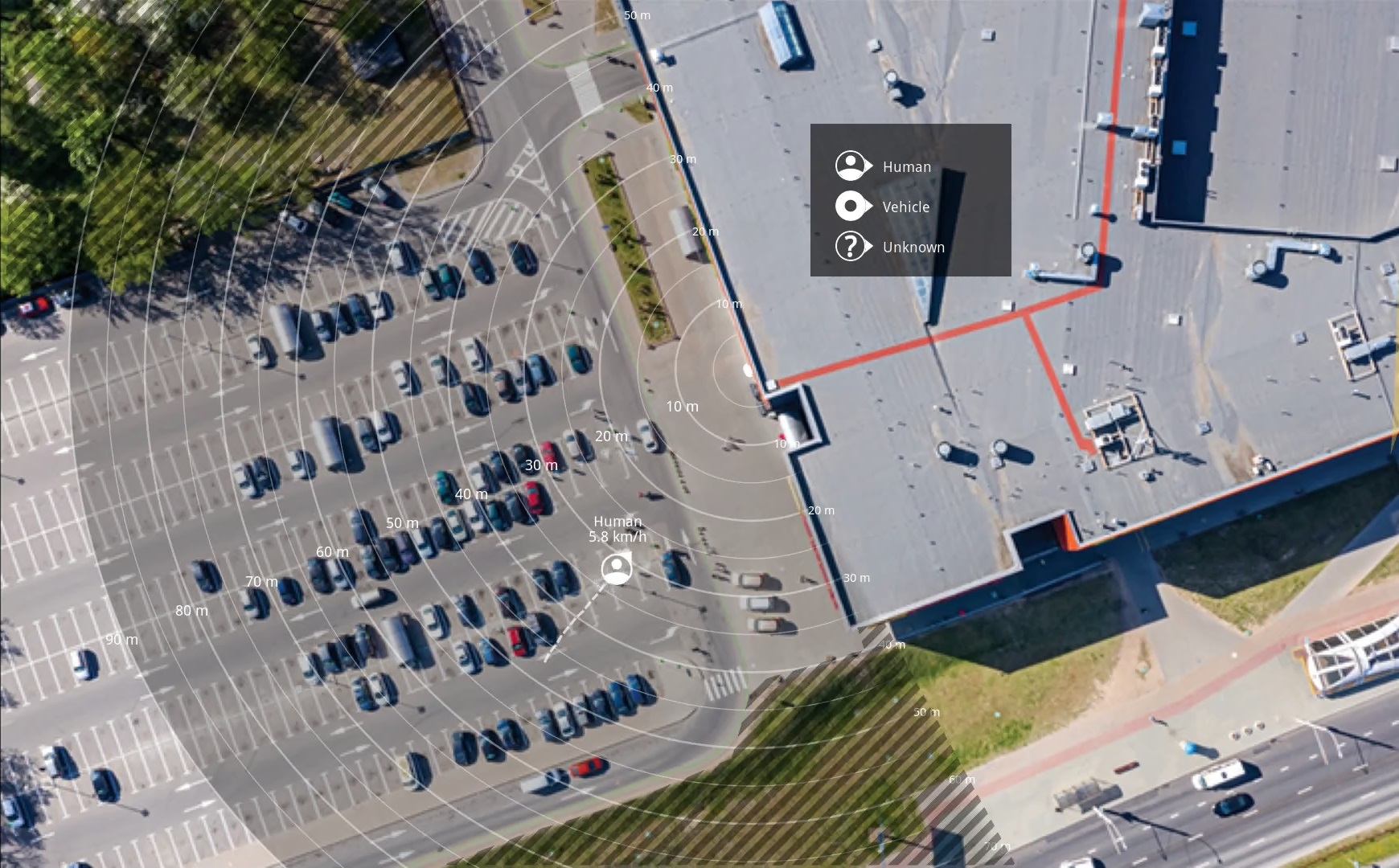
このアプリケーションは、物体のクラス、距離、速度をカメラビューにカスタマイズ可能な視覚的なオーバーレイとして表示できます。また、このデータを使用してイベントをトリガーすることも可能です。
要件
レーダーとパノラマカメラは、それぞれのインストールガイドに従って取り付け、設定する必要があります。
パノラマカメラはレーダーの上または下に取り付け、レーダーからの距離は50 cm以内とする必要があります。
レーダーとパノラマカメラは垂直に配置する必要があります。
レーダーとパノラマカメラは、水平線に対して水平に設置する必要があります。AXIS Q3839およびAXIS Q4809では、ロール機能を使用してカメラの水平を調整できます。
互換性のあるカメラのリストについては、AXIS Radar Data Visualizer | Axis Communicationsを参照してください。
レーダーのリストについては、axis.com/ja-jp/products/radarsを参照してください。
使用に当たって
レーダーキャリブレーションを行う
レーダーを設置すると、レーダーのデフォルトのライブビューにはレーダーの検知ゾーンと検知した動きが表示され、シナリオやルールをすぐに追加できます。レーダーとの接続を設定し、アプリケーションのオーバーレイを設定する前に、シーンに合わせてレーダーのキャリブレーションを行います。
レーダーの取り付けの高さが、カメラのWebインターフェースで設定されたレーダーの高さに対応していることを確認します。レーダーが別の高さに取り付けられている場合は、レーダーのキャリブレーションを行って、取り付けの高さを補正する必要があります。
レーダーのキャリブレーションを行うには、以下の手順に従います。
カメラのWebインターフェースにログインします。
[Radar (レーダー)] > [Settings (設定)] > [General (一般)] に移動し、取り付け高さを入力します。
[Radar (レーダー)] > [Settings (設定)] > [Detection (検知)] で、[Ignore swaying objects (揺らめいている物体を無視)] をオンにして、シナリオから茂みや木、標識などを除外します。レーダーの真正面に道路標識がないことを確認してください。
マップキャリブレーション
物体が動いている場所を見やすくするために、平面図や航空写真など、レーダーがカバーしている範囲を示す参照マップをアップロードすることができます。
- 画像の要件は以下のとおりです。
サポートされるファイル形式は、jpegとpngです。
画像はレーダーでトリミングすることができます。
キャリブレーション中にレーダーの到達範囲の形状が画像に合わせて移動するため、向きは重要ではありません。
[Radar (レーダー)] > [Map calibration (マップのキャリブレーション)] に移動し、設定アシスタントに従ってマップをアップロードし、キャリブレーションを行います。
レーダーの設定の詳細については、axis.comでお使いのレーダーのドキュメントを参照してください。
レーダープロファイルの選択
AXIS D2122-VEにはエリア監視プロファイルのみが搭載されています。
Axisレーダーは、エリア監視と道路監視の2つの監視プロファイルをサポートしています。Axis Radar Data Visualizerを使用するには、エリア監視プロファイルを選択します。
レーダーのwebインターフェースにログインします。
[Radar > Settings > Detection > Radar profile (レーダー > 設定 > 検知 > レーダープロファイル)] に移動します。
[Area monitoring (エリア監視)] を選択します。
このプロファイルは、最高時速55 km/h (34 mph) で移動する人間、車両、未知の物体を追跡するために最適化されています。
- 検知範囲、設置例、ユースケースについては、レーダーのユーザーマニュアル (help.axis.com) を参照してください。
アプリケーションのダウンロードとインストール
アプリケーションをインストールするには、axis.com/products/axis-radar-data-visualizerに移動し、最新のバージョンをダウンロードします。レーダーに接続するパノラマカメラにログインし、以下の手順に従います。
パノラマカメラのwebインターフェースにログインします。
[Apps] (アプリ) に移動します。
[Add app (アプリの追加)] をクリックします。
ダウンロードフォルダー内のファイルを選択します。
[インストール] をクリックします。
アプリを起動すると、アプリがアクティブ化されます。
アプリケーションをアップグレードするには、新しいバージョンをインストールするだけです。以前のバージョンをアンインストールする必要はありません。
設定
カメラをレーダーとペアリングする:
Radar Data Visualizerが機能するには、パノラマカメラをレーダーとペアリングする必要があります。パノラマカメラのwebインターフェースで:
[Apps (アプリ)] でAXIS Radar Data Visualizerを開きます。
[Open edge-to-edge (エッジツーエッジを開く)] をクリックします。
[追加] をクリックします。
ペアリングタイプを選択します。
レーダーのIPアドレス、ユーザー名およびパスワードを入力します。
[接続] をクリックします。
境界ボックスとメタデータを設定する
境界ボックスとメタデータの表示/非表示を選択することができます。
- AXIS Radar Data Visualizerで、以下の操作を行います。
[Video stream settings (ビデオストリーム設定)] に移動します。
境界ボックスを表示または非表示にするには、[Show bounding boxes (境界ボックスを表示)] のオン/オフを切り替えます。
メタデータを含めるには、[Show distance and vehicle speed (距離と車速を表示)] を選択します。
境界ボックスのキャリブレーションにより、ボックスの垂直方向の位置のずれを調整することができます。
- AXIS Radar Data Visualizerで、以下の操作を行います。
[Calibrate bounding boxes (境界ボックスのキャリブレーション)] に移動します。
矢印をクリックして、境界ボックスの垂直位置を調整します。
境界ボックスをキャリブレーションするには、シーンに人または車両が存在する必要があります。
地域設定を選択する
アプリケーションで速度と距離の単位を選択します。
- AXIS Radar Data Visualizerで、以下の操作を行います。
[Regional settings (地域設定)] に移動します。
速度を時速キロメートル (km/h) で表示するか、時速マイル (mph) で表示するかを選択します。
距離をメートルで表示するかフィートで表示するかを選択します。
検知ゾーンを作成する
検知ゾーンを作成し、動く物体やスピード違反車両を検知するようにアプリケーションを設定します。Axisデバイスのイベント管理システム、またはサードパーティ製ソフトウェアを使用すると、ゾーンでの検知に基づいてアクションをトリガーすることがきます。
- AXIS Radar Data Visualizerで、以下の操作を行います。
[+ Detection zone (+ 検知ゾーン)] をクリックします。ライブビューに黄色のボックスが表示されます。
ゾーンの形状を変更するには、黄色のボックスの隅にあるアンカーポイントをクリックしてドラッグします。
ゾーンの名前を入力します。
ゾーンで検知してトリガーする対象を選択します。
[Trigger on moving objects (移動物体でトリガー)] は、移動する物体が検知されるとイベントを送信します。
[Trigger on vehicle speed (車速でトリガー)] は、検知ゾーン内で検知された車両が設定速度の範囲内または範囲外で走行するとイベントを送信します。
- 注
トリガーを1つだけ選択することも、両方のトリガーを同時に使用することもできます。これらは互いに独立して機能します。例えば、[Trigger on moving objects (移動物体でトリガー)] で選択した物体のタイプは、[Trigger on vehicle speed (車速でトリガー)] の設定には影響しません。
- ゾーン内の移動物体でトリガーする場合:
[Trigger on moving objects (移動物体でトリガー)] をオンにします。
トリガーする物体のタイプを選択します。以下のタイプを選択できます。
人物
車両
不明
- 車速でトリガーする場合:
[Trigger on vehicle speed (車速でトリガー)] をオンにします。
車両を検知する速度を設定します。
スライダーを使用して速度範囲を設定するか、[From (最低)] と [To (最大)] の欄に範囲の最低値と最大値を入力します。
設定範囲外の速度でトリガーするには、[Invert slider (スライダーを反転)] をクリックします。[From (最低)] および [To (最大)] の欄は、自動的に [Below (以下)] および [Above (以上)] に変更されます。
- ゾーンを削除するには、リストでゾーンを選択し、[Remove detection zone (検知ゾーンを削除)] をクリックします。
- 注
追加した検知ゾーンなしでビデオストリームを表示するには、[Video stream settings (ビデオストリーム設定)] に移動し、[Show detection zones (検知ゾーンの表示)] をオフにします。
イベントのルールを設定する
特定のイベントが発生したときにデバイスにアクションを実行させるように、ルールを作成することができます。ルールは条件とアクションで構成されます。条件を使用して、アクションをトリガーすることができます。たとえば、デバイスは動きを検知したときに、録画を開始したり、電子メールを送信したりすることができ、デバイスが録画をしている間にオーバーレイテキストを表示することができます。
詳細については、「イベントのルールの使用開始」を参照してください。
アクションをトリガーする
[System > Events (システム > イベント)] に移動し、ルールを追加します。このルールでは、装置が特定のアクションを実行するタイミングを定義します。ルールは、スケジュールや繰り返しとして設定することも、手動でトリガーするように設定することもできます。
[Name (名前)] に入力します。
アクションをトリガーするために満たす必要がある [Condition (条件)] を選択します。ルールに複数の条件を指定した場合は、すべての条件が満たされたときにアクションがトリガーされます。
条件が満たされたら実行するAction (アクション) を選択します。
- ルールに使用されるストリームプロファイルの定義を変更する場合は、そのストリームプロファイルを使用するすべてのルールを再び開始する必要があります。
シーン内の移動する物体を拡大して録画する
この例では、シーン内の移動する物体によってビューエリアがアクティブになった場合に、ダイナミックビューエリアの録画を開始するようにデバイスを設定する方法について説明します。ダイナミックビューエリアが複数ある場合は、それぞれに対して1つずつルールを作成します。詳細については、ダイナミックビューエリアを参照してください。
AXIS Radar Data Visualizerで、[Dynamic view areas (ダイナミックビューエリア)] をオンにします。
デバイスのwebインターフェースで、[System (システム)] > [Events (イベント)] に移動し、ルールを追加します。
ルールの名称を入力します (例:
Record dynamic view area 1)。条件のリストで [Applications (アプリケーション)] の下の [ARDV –Dynamic View Area [number] を選択します。
アクションのリストで、[Record video while the rule is active (ルールがアクティブである間、ビデオを録画する)] を選択します。
カメラのリストで、条件で選択したのと同じダイナミックビューエリアを選択します。
録画を保存する場所を選択します。
[保存] をクリックします。
詳細情報
ダイナミックビューエリア
ダイナミックビューエリアはフルビューの一部を切り取ったエリアで、自動的に有効になりシーン内の移動する物体の周りに配置されます。物体に焦点を当てたダイナミックビューエリアのストリームや録画が可能です。
夜間に閉鎖される駐車場などの活動が少ないシーンにダイナミックビューエリアを使用します。
ダイナミックビューエリアをオンにすると、1つのエリアが自動的に追加されます。さらに3つを追加して、合計4つにすることができます。
移動する物体が検知ゾーンに入ると、その物体を中心にダイナミックビューエリアが設定され、その物体がシーンから消えるまで追跡します。4つのダイナミックビューエリアを追加すると、移動する4つの異なる物体を継続的に追跡できます。ダイナミックビューエリアの数より移動する物体が多い場合、追跡中の物体が1つシーンから消えると新しい物体の追跡が開始します。
最大でカメラに合計8つのビューエリアを作成できます。その1つはレーダー接続用に確保され、残り4つをダイナミックビューエリアとして使用できます。AXIS Radar Data Visualizerでダイナミックビューエリアを作成する必要があります。
AXIS Radar Data Visualizerでダイナミックビューエリアを削除することをお勧めします。カメラのWebインターフェースで [Video (ビデオ)] > [View areas (ビューエリア)] からダイナミックビューエリアを削除すると、ダイナミックビューエリアの設定と鑑賞することがあります。
例
カメラのWebインターフェースには、7つのレギュラービューエリアがあります。AXIS Radar Data Visualizerに移動し、[Dynamic view areas (ダイナミックビューエリア)] をオンにすると、ダイナミックビューエリアが1つ追加されます。もう1つ追加しようとすると、エラーメッセージが表示されます。ダイナミックビューエリアを追加するには、まずカメラのWebインターフェースで、[Video (ビデオ)] > [View areas (ビューエリア)] からレギュラービューエリアを削除する必要があります。