애플리케이션에 대한 정보
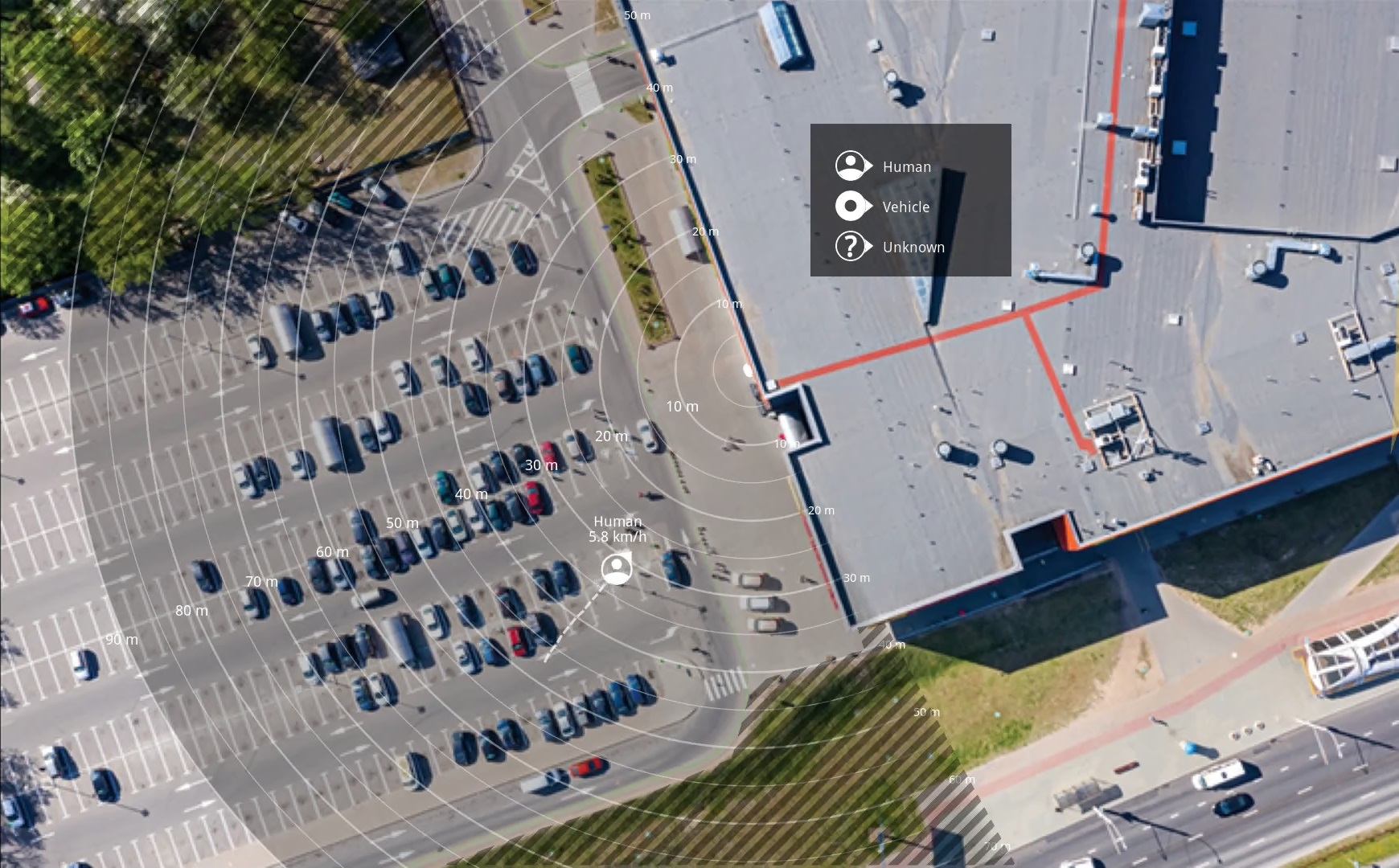
AXIS Speed Monitor는 카메라의 실시간 보기에서 레이더 감지 영역에 있는 차량의 속도를 시각화하고 통계 처리를 위해 SD 카드에 레이더 트랙을 기록합니다. 이 애플리케이션에는 Axis 카메라와 Axis 레이더가 필요하거나 Axis 레이더만 필요합니다. 호환되는 Axis 카메라 목록은 axis.com/products/axis-speed-monitor#compatible-products 를 참조하십시오.
예를 들어 개인정보 보호 문제나 통계 목적으로만 카메라 없이 독립형 레이더 설비에서 해당 애플리케이션을 사용할 수 있습니다. 그러면 속도 오버레이가 레이더의 실시간 보기에서 시각화됩니다.
레이더 또는 레이더-비디오 융합 카메라는 설치 가이드 및 사용자 설명서에 따라 마운트 및 구성되어야 합니다. 자세한 내용은 각 장치의 사용자 설명서를 참조하십시오.
통계를 기록하려면 애플리케이션이 설치된 장치에 SD 카드를 설치하십시오.
시작하기
레이더 보정
레이더가 설치되었을 때, 레이더의 기본 실시간 보기에서 레이더 범위 및 감지된 모든 모션을 보여 주며 시나리오 및 룰을 즉시 추가할 수 있습니다. 레이더와의 연결을 설정하고 애플리케이션 오버레이를 구성하기 전에 장면에 대한 레이더를 보정합니다.
레이더의 마운팅 높이가 카메라의 웹 인터페이스에 설정된 레이더 높이와 일치하는지 확인하십시오. 레이더가 다른 높이에 마운트된 경우, 마운팅 높이를 보정하기 위해 레이더를 보정해야 합니다.
레이더 보정 방법:
카메라의 웹 인터페이스로 로그인합니다.
Radar(레이더) > Settings(설정) > General(일반)로 이동하여 장착 높이를 입력합니다.
Radar(레이더) > Settings(설정) > Detection(감지)에서 Ignore swaying objects(흔들리는 객체 무시)를 켜서 시나리오에서 관목, 나무 및 표지판을 제외합니다. 레이더 바로 앞에 도로 표지판이 없는지 확인합니다.
지도 보정
객체가 움직이는 위치를 보다 쉽게 보려면 레이더에서 커버하는 구역을 보여 주는 항공 사진 또는 지면 배치도 등의 참조 맵을 업로드합니다.
- 이미지 요구 사항:
지원되는 파일 형식은 jpeg 및 png입니다.
레이더에서 이미지를 자를 수 있습니다.
보정하는 동안 이미지에 맞춰 레이더 커버리지 모양이 이동하므로 방향은 중요하지 않습니다.
Radar(레이더) > Map calibration(지도 보정)으로 이동하여 설정 도우미를 따라 지도를 업로드하고 보정합니다.
레이더 설정에 대한 자세한 내용은 axis.com에서 해당 레이더의 사용자 문서를 참조하십시오.
레이더 프로파일을 선택합니다.
영역 모니터링이나 도로 모니터링에 Axis 레이더를 사용할 수 있습니다. 각 시나리오에 최적화된 두 가지 프로파일이 있습니다.
Area monitoring profile(영역 모니터링 프로파일): 더 낮은 속도로 움직이는 인간, 차량 및 알 수 없는 객체를 추적합니다.
Road monitoring profile(도로 모니터링 프로파일): 주로 고속으로 이동하는 차량을 추적합니다.
프로파일을 선택하려면, 레이더의 웹 인터페이스에서 Radar > Settings > Detection(레이더 > 설정 > 감지)으로 이동합니다.
감지 범위, 설치 예 및 사용 사례에 대한 자세한 내용은 각 장치의 사용자 설명서를 참조하십시오.
시나리오 추가
레이더의 트리거 조건과 디텍션 설정을 정의하는 시나리오를 추가하십시오. 시나리오를 AXIS Speed Monitor로 가져옵니다.
- 시나리오 추가:
레이더의 웹 인터페이스에서 Radar > Scenarios(레이더 > 시나리오)로 이동합니다.
Add scenario(시나리오 추가)를 클릭합니다.
시나리오 이름을 입력하십시오.
영역에서 움직이거나 하나 이상의 라인을 가로지르는 객체에 대해 트리거하려면 선택합니다.
- 영역에서 움직이는 객체에 대한 트리거:
Movement in area(영역 내 이동)를 선택합니다.
Next (다음)를 클릭합니다.
시나리오에 포함되어야 하는 영역 유형을 선택합니다.
마우스를 사용하여 레이더 이미지나 참조 지도의 원하는 부분을 포함할 수 있도록 영역을 이동하고, 모양을 변경합니다.
Next (다음)를 클릭합니다.
감지 설정을 추가합니다.
Ignore short-lived objects(빠른 객체 무시) 아래에서 트리거까지 걸리는 초를 추가합니다.
Trigger on object type(객체 유형에 대한 트리거) 아래에서 트리거할 객체 유형을 선택합니다.
Speed limit(속도 제한) 아래에서 속도 제한 범위를 추가합니다.
Next (다음)를 클릭합니다.
Minimum trigger duration(최소 트리거 기간) 아래에서 알람의 최소 지속 시간을 설정합니다.
Save(저장)를 클릭합니다.
- 라인을 가로지르는 객체에서 트리거:
Line crossing(라인 횡단)을 선택합니다.
Next (다음)를 클릭합니다.
장면에 라인을 배치합니다.
마우스를 사용하여 라인을 이동하고 모양을 조정합니다.
감지 방향을 변경하려면 Change direction(방향 전환)을 켭니다.
Next (다음)를 클릭합니다.
감지 설정을 추가합니다.
Ignore short-lived objects(빠른 객체 무시) 아래에서 트리거까지 걸리는 초를 추가합니다.
Trigger on object type(객체 유형에 대한 트리거) 아래에서 트리거할 객체 유형을 선택합니다.
Speed limit(속도 제한) 아래에서 속도 제한 범위를 추가합니다.
Next (다음)를 클릭합니다.
Minimum trigger duration(최소 트리거 기간) 아래에서 알람의 최소 지속 시간을 설정합니다.
기본값은 2초로 설정되어 있습니다. 객체가 라인을 넘을 때마다 시나리오가 트리거되도록 하려면 지속 시간을 0초로 낮춥니다.
Save(저장)를 클릭합니다.
- 두 개의 라인을 넘는 객체에서 트리거:
Line crossing(라인 횡단)을 선택합니다.
Next (다음)를 클릭합니다.
알람이 트리거될 때 객체가 두 라인을 넘도록 하려면 Require crossing of two lines(두 라인을 횡단해야 함)를 켭니다.
장면에 라인을 배치합니다.
마우스를 사용하여 라인을 이동하고 모양을 조정합니다.
감지 방향을 변경하려면 Change direction(방향 전환)을 켭니다.
Next (다음)를 클릭합니다.
감지 설정을 추가합니다.
Max time between crossings(교차로 간 최대 시간) 아래에서 첫 번째 라인과 두 번째 라인 사이의 시간 제한을 설정합니다.
Trigger on object type(객체 유형에 대한 트리거) 아래에서 트리거할 객체 유형을 선택합니다.
Speed limit(속도 제한) 아래에서 속도 제한 범위를 추가합니다.
Next (다음)를 클릭합니다.
Minimum trigger duration(최소 트리거 기간) 아래에서 알람의 최소 지속 시간을 설정합니다.
기본값은 2초로 설정되어 있습니다. 객체가 두 개의 라인을 넘을 때마다 시나리오가 트리거되도록 하려면 지속 시간을 0초로 낮춥니다.
Save(저장)를 클릭합니다.
애플리케이션을 다운로드하고 설치합니다
애플리케이션을 설치하려면, axis.com/products/axis-speed-monitor로 이동하고 최신 버전을 다운로드하십시오. 레이더에 연결하려는 카메라에 로그인하거나 레이더에 직접 로그인하고 다음 단계를 따르십시오.
Apps(앱)로 이동합니다.
앱 추가를 클릭하십시오.
다운로드 폴더에서 파일을 선택합니다.
설치를 클릭합니다.
앱을 켜서 애플리케이션을 활성화합니다.
애플리케이션을 업그레이드하려면 최신 버전을 설치하기만 하면 됩니다. 이전 버전을 제거할 필요는 없습니다.
애플리케이션을 구성합니다
카메라와 연결된 레이더의 시간과 날짜를 NTP 서버와 동기화합니다. 시간과 날짜가 동기화되지 않으면 통계 내보내기에 올바른 정보가 표시되지 않으며 AXIS Speed는 장치에서 설정한 이벤트를 모니터링합니다. 카메라가 올바르게 트리거되지 않을 수 있습니다.
카메라의 웹 인터페이스에서:
Apps(앱)로 이동합니다.
AXIS Speed Monitor로 이동하고 Open(열기)을 클릭합니다.
- 비고
레이더-영상 융합 카메라에서는 통합 레이더가 카메라에 자동으로 연결됩니다.
Connect to radar(레이더에 연결)로 이동하십시오.
레이더의 주소, 사용자 이름 및 패스워드를 입력합니다.
연결을 클릭합니다.
- 레이더에 설정된 시나리오를 AXIS Speed Monitor로 가져옵니다.
오버레이를 추가하려면, 시나리오를 클릭하여 매개변수를 추가하고 편집합니다.
다음 매개변수와 해당 오버레이를 추가할 수 있습니다.
#n: 시나리오의 이름.
#M: 시나리오에서 가장 빠르게 움직이는 객체의 실시간 속도 측정.
#c: 지난 15분 동안 지나간 차량의 수.
#a: 지난 15분 동안의 평균 속도.
오버레이를 실시간 보기, 클릭로 옮기고 드래그를 놓아봅니다.
실시간 보기에서 오버레이를 제거하려면 해당 오버레이 매개변수를 제거합니다.
레이더 시나리오의 이름을 변경하고 싶다면, 레이더의 웹 인터페이스의 Radar > Scenarios(레이더 > 시나리오)로 이동하십시오. 편집할 시나리오의 이름을 클릭합니다.
통계 내보내기
애플리케이션은 통계를 기록하며, 이를 쉼표로 구분된 파일(csv)로 다운로드할 수 있습니다. 그날의 통계나 설정된 날짜 범위를 다운로드할 수 있습니다. 내보내기 파일의 정보에는 범위 내에서 감지된 모든 움직이는 물체와 이러한 물체가 특정 레이더 시나리오에 들어오거나 나갈 때가 포함됩니다.
레이터 추적 데이터를 기록하려면 앱이 설치된 장치에 SD 카드를 설치하십시오.
MQTT를 통해 레이더 추적 데이터를 전송할 수도 있습니다. 자세한 내용은 을 참조하십시오.
- 파일의 매개변수:
rmd_zone 이름: 시나리오의 이름.
tracking_id: 레이더 메타데이터 스트림의 객체 ID입니다. 레이더를 재시작하면 카운터가 1로 재설정됩니다.
trigger_count: 시나리오에 활성 추적 객체가 있는 동안 시나리오가 트리거된 횟수입니다.
object_class: 이용할 수 있는 객체 클래스는 '사람', '차량', '알 수 없음'입니다. 시나리오에서 계수하려는 클래스를 선택합니다.
평일: track_id가 시나리오에 입력될 때의 평일.
날짜: track_id가 시나리오에 입력될 때의 날짜.
시간: track_id가 시나리오에 HH:MM:SS로 입력될 때의 시간.
기간: 시나리오에서 track_id가 보낸 시간. 초 단위로 제공됨.
enter_bearing 및 exit_bearing: 시나리오에 처음 들어오고 나갈 때 객체가 가리키고 있던 방향입니다. 베어링은 도 단위로 제공되며 레이더 메타데이터와 동일한 규칙을 따릅니다.
enter_direction 및 exit_direction: “출발“, “오른쪽“, “접근“, “왼쪽“ 등 이동에 대한 텍스트 설명입니다.
min_speed, avg_speed, max_speed: 객체가 시나리오 내에서 이동한 최저, 평균 및 최고 속도입니다. 지역 설정에 따라 시간당 킬로미터 (km/h) 또는 시간당 마일 (mph) 로 표시됩니다.
speed_delta 객체가 시나리오를 나가는 속도와 시나리오에 들어갈 때의 차이. 지역 설정에 따라 시간당 킬로미터 (km/h) 또는 시간당 마일 (mph) 로 표시됩니다. 양수는 가속을 의미하고 음수는 감속을 의미합니다.
알람: 시나리오 내에서 객체가 허용되지 않는 속도로 이동했는지 여부를 나타냅니다. 0은 허용 가능한 속도, 1은 한 지점에서 허용되지 않는 속도를 의미합니다.
레이더 데이터를 전송하기 위해 MQTT 사용
MQTT를 통해 통계 내보내기 항목에 나열된 레이더 추적 데이터를 보낼 수 있습니다.
이 예에서는 설치된 AXIS Speed Monitor 장치에서 MQTT 클라이언트를 설정하는 방법 및 MQTT 브로커에 대한 페이로드로 AXIS Speed Monitor에서 수집된 레이더 데이터를 게시하는 조건을 만드는 방법을 설명합니다.
- 시작하기 전:
MQTT 브로커를 설정하고 브로커의 IP 주소, 사용자 이름 및 패스워드를 가져옵니다.
AXIS OS 기술 자료에서 MQTT 및 MQTT 브로커에 대해 자세히 알아보십시오.
- 설치한 AXIS Speed Monitor 장치의 웹 인터페이스에서 MQTT 클라이언트를 설정하십시오.
System > MQTT > MQTT client > Broker(시스템 > MQTT > MQTT 클라이언트 > 브로커)로 이동하고 다음 정보를 입력합니다.
호스트: 브로커 IP 주소
Client ID(클라이언트 ID): 장치의 ID
Protocol(프로토콜): 브로커가 설정된 프로토콜
포트: 브로커가 사용하는 포트 번호
브로커 Username(사용자 이름)과 Password(패스워드)
Save(저장) 및 Connect(연결)을 클릭합니다.
- 레이더 데이터를 MQTT 브로커에 페이로드로 게시하는 조건을 생성하십시오.
System > MQTT > MQTT publication(시스템 > MQTT > MQTT 게시)으로 이동하고 + Add condition(+ 조건 추가)를 클릭합니다.
조건 목록의 Application(애플리케이션)에서 Speed Monitor: Track exited zone(속도 모니터: 트랙 이탈 영역)을 선택합니다.
이제 장치는 시나리오에서 나가는 모든 움직이는 객체에 대한 레이더 추적에 대한 정보를 보낼 수 있습니다. 모든 객체에는 rmd_zone_name, tracking_id, trigger_count 등과 같은 고유한 레이더 추적 매개변수가 있습니다. 레이더 추적 매개변수의 전체 목록은 통계 내보내기 항목을 참고하십시오.
매개변수 min_speed, avg_speed, max_speed, speed_delta는 MQTT 탑재체에서만 초당 미터 (m/s) 로만 사용할 수 있으며, km/h 또는 mph로는 사용할 수 없습니다.
이벤트의 룰 설정
자세한 내용은 이벤트 룰 시작하기를 참조하십시오.
액션 트리거
System > Events(시스템 > 이벤트)로 이동하고 룰을 추가합니다. 룰은 장치가 특정 액션을 수행하는 시간을 정의합니다. 규칙을 예약, 반복 또는 수동 트리거로 설정할 수 있습니다.
Name(이름)을 입력합니다.
작업을 트리거하려면 충족해야 하는 Condition(조건)을 선택합니다. 룰에 하나 이상의 조건을 지정하려면 모든 조건이 액션을 트리거하도록 충족해야 합니다.
조건이 충족되면 수행할 Action(액션)을 선택합니다.
레이더가 속도 위반을 감지하면 스트로브 사이렌 활성화
Axis 스트로브 사이렌을 사용하면 과속을 하는 사람에게 경계구역이 보호되고 있음을 알릴 수 있습니다.
이 예는 AXIS Speed Monitor가 연결된 레이더를 사용하여 속도 위반을 감지할 때마다 스트로브 사이렌에서 프로파일을 활성화하는 방법을 설명합니다.
- 전제 조건
스트로브 사이렌에서 운영자 또는 관리자 역할을 가진 새 사용자를 생성합니다.
스트로브 사이렌에서 두 개의 프로파일 생성: 하나는 운전자가 허용 속도 내에서 이동할 때를 위한 것이고, 다른 하나는 속도 제한을 위반했을 때를 위한 것입니다.
카메라에서 AXIS Speed Monitor를 설정
연결된 레이더에 'Area 1(영역 1)'이라는 시나리오를 추가합니다.
- 카메라에 두 명의 수신자를 생성
카메라의 웹 인터페이스에서 System > Events > Recipients(시스템 > 이벤트 > 수신자)로 이동하고 수신자를 추가합니다.
다음 정보를 입력합니다.
이름: 가상 포트 활성화
유형: HTTP
URL: http://<IPaddress>/axis-cgi/virtualinput/activate.cgi
스트로브 사이렌의 주소와 함께 <IPaddress>를 바꿉니다.
새로 생성된 스트로브 사이렌 사용자의 사용자 이름과 패스워드입니다.
모든 데이터가 유효한지 확인하기 위해 Test(테스트)를 클릭합니다.
저장을 클릭합니다.
다음 정보를 사용하여 두 번째 수신자를 추가합니다.
이름: 가상 포트 비활성화
유형: HTTP
URL: http://<IPaddress>/axis-cgi/virtualinput/deactivate.cgi
스트로브 사이렌의 주소와 함께 <IPaddress>를 바꿉니다.
새로 생성된 스트로브 사이렌 사용자의 사용자 이름과 패스워드입니다.
모든 데이터가 유효한지 확인하기 위해 Test(테스트)를 클릭합니다.
저장을 클릭합니다.
- 카메라에 두 룰을 생성
Rules(룰)로 이동하고 룰을 추가합니다.
다음 정보를 입력합니다.
이름: 가상 IO1 활성화
Condition(조건): Applications(애플리케이션) > Speed Monitor: Area 1(속도 모니터: 영역 1)
Action(액션): Notifications > Send notification through HTTP(알림 > HTTP를 통해 알림 전송)
Recipient(수신자): 가상 포트 활성화
Query string suffix(쿼리 문자열 접미사): schemaversion=1&port=1
저장을 클릭합니다.
다음 정보가 포함된 다른 룰을 추가합니다.
이름: 가상 IO1 비활성화
Condition(조건): Applications(애플리케이션) > Speed Monitor: Area 1(속도 모니터: 영역 1)
Action(액션): Notifications > Send notification through HTTP(알림 > HTTP를 통해 알림 전송)
Recipient(수신자): 가상 포트 비활성화
Query string suffix(쿼리 문자열 접미사): schemaversion=1&port=1
저장을 클릭합니다.
- 스트로보 사이렌에서 룰을 생성
스트로브 사이렌의 장치 인터페이스에서 System > Events(시스템 > 이벤트)로 이동하고 룰을 추가합니다.
다음 정보를 입력합니다.
이름: 가상 입력 1에서 트리거
Condition(조건): I/O > Virtual input(가상 입력)
포트:1
Action(액션): Light and siren > Run light and siren profile while the rule is active(조명 및 사이렌 > 룰이 활성 상태인 동안 조명 및 사이렌 프로파일 실행)
Profile(프로파일): 새로 생성된 프로파일 선택
저장을 클릭합니다.
통합
AXIS Camera Station 사용자의 경우
AXIS Speed Monitor 설정
AXIS Speed Monitor 앱은 레이더에 연결된 장치에 설치하거나 레이더에 직접 설치할 수 있습니다.
장치 또는 레이더가 AXIS Speed Monitor로 구성되면 AXIS Camera Station에서 외부 데이터 소스로 간주됩니다. 보기를 데이터 소스에 연결하고 장치에서 캡처한 객체 속도를 검색하고 관련 이미지를 볼 수 있습니다.
장치에 애플리케이션을 다운로드하여 설치합니다.
애플리케이션과 레이더를 구성합니다. AXIS Speed Monitor 사용자 설명서를 참조하십시오.
기존 AXIS Camera Station 설치 시 클라이언트 통신에 사용되는 서버 인증서를 갱신하십시오. 인증서 갱신을 참조하십시오.
시간 동기화를 켜서 AXIS Camera Station 서버를 NTP 서버로 사용합니다. 서버 설정을 참조하십시오.
관련 장치를 AXIS Camera Station에 추가합니다. 장치 추가를 참조하십시오.
레이더에 연결된 장치에 앱이 설치된 경우 장치와 레이더를 추가합니다.
앱이 레이더에 설치된 경우 레이더를 추가합니다.
첫 번째 이벤트가 수신되면 Configuration > Devices > External data sources(구성 > 장치 > 외부 데이터 소스) 아래에 데이터 소스가 자동으로 추가됩니다.
데이터 소스를 보기에 연결합니다. 외부 데이터 소스 항목을 참고하십시오.
장치에서 캡처한 객체 속도를 검색합니다. 데이터 검색 항목을 참조합니다.
 을 클릭하여 검색 결과를 .txt 파일로 내보냅니다.
을 클릭하여 검색 결과를 .txt 파일로 내보냅니다.
Milestone Xprotect 사용자용
AXIS Optimizer for Milestone Xprotect®에는 Zone speed search(영역 속도 검색)라는 기능이 포함되어 있습니다. 이 기능은 카메라의 라이브 뷰에서 레이더 감지 구역의 차량 속도를 시각화하기 위해 AXIS Speed Monitor와 함께 작동합니다.
구역 속도 검색을 사용하여 카메라 보기에서 미리 결정된 구역에 들어갈 때 감지된 과속 차량을 검색합니다. Zone speed search(구역 속도 검색)는 AXIS Optimizer 사용자 설명서에서 자세한 내용을 참조하십시오.