アプリケーションについて
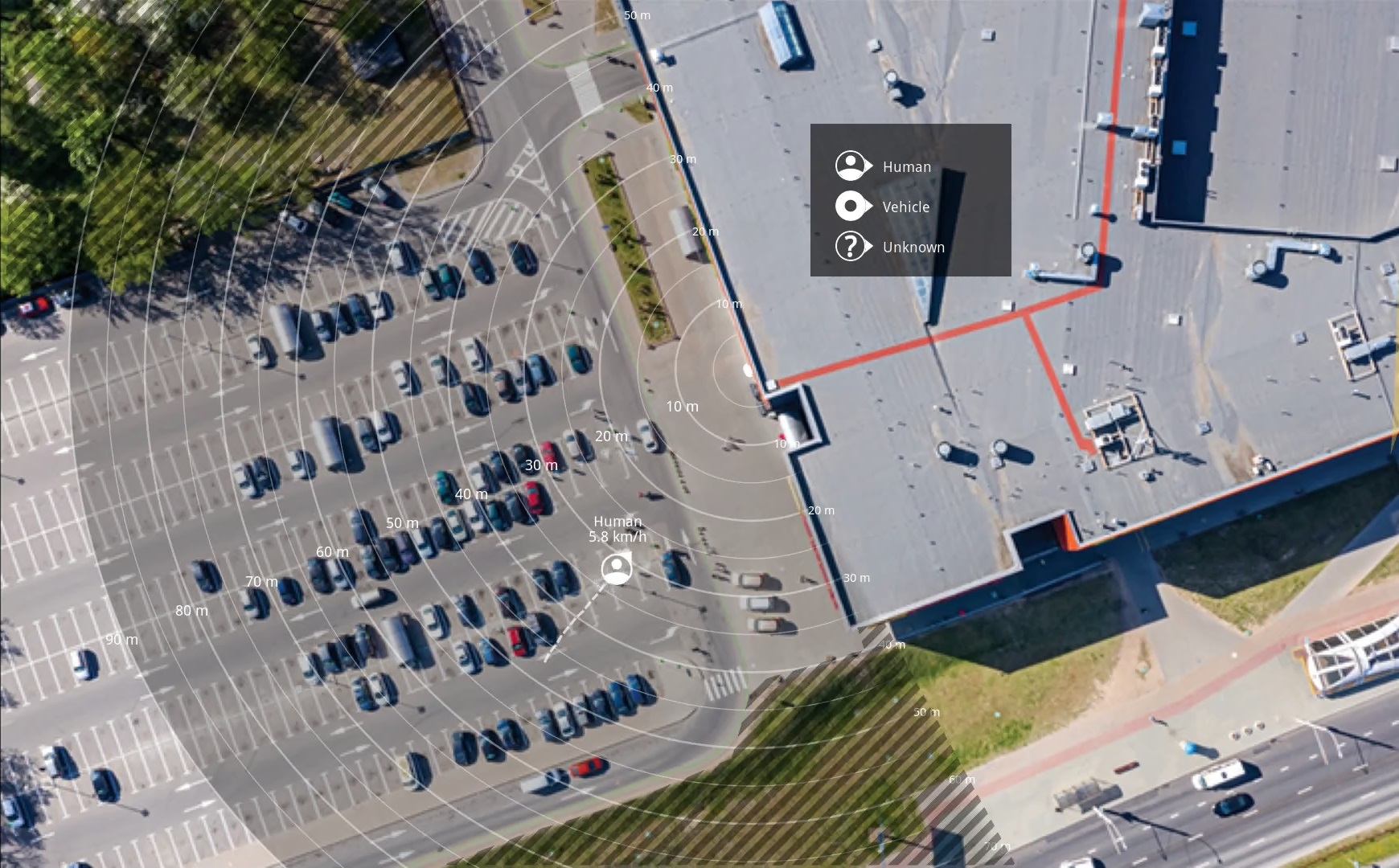
AXIS Speed Monitorは、レーダー検知ゾーン内の車両の速度をカメラのライブビューで可視化し、レーダーのトラックを統計処理のためにSDカードに記録します。このアプリケーションには、AxisカメラとAxisレーダー、またはAxisレーダーだけが必要です。対応するAxisカメラの一覧については、axis.com/products/axis-speed-monitor#compatible-productsを参照してください。
カメラのないスタンドアロンレーダーの設置の場合は、プライバシーの懸念のため、または統計処理のみを目的として、アプリケーションを直接レーダーにインストールできます。その後、速度はレーダーのライブビューに表示されます。
レーダーまたはレーダービデオ融合カメラは、インストールガイドとユーザーマニュアルに従って取り付ける必要があります。詳細については、各装置のユーザードキュメントを参照してください。
統計情報を記録できるようにするには、アプリケーションがインストールされている装置にSDカードを装着します。
使用に当たって
レーダーキャリブレーションを行う
レーダーを設置すると、レーダーのデフォルトのライブビューにはレーダーの検知ゾーンと検知した動きが表示され、シナリオやルールをすぐに追加できます。レーダーとの接続を設定し、アプリケーションのオーバーレイを設定する前に、シーンに合わせてレーダーのキャリブレーションを行います。
レーダーの取り付けの高さが、カメラのWebインターフェースで設定されたレーダーの高さに対応していることを確認します。レーダーが別の高さに取り付けられている場合は、レーダーのキャリブレーションを行って、取り付けの高さを補正する必要があります。
レーダーのキャリブレーションを行うには、以下の手順に従います。
カメラのWebインターフェースにログインします。
[Radar (レーダー)] > [Settings (設定)] > [General (一般)] に移動し、取り付け高さを入力します。
[Radar (レーダー)] > [Settings (設定)] > [Detection (検知)] で、[Ignore swaying objects (揺らめいている物体を無視)] をオンにして、シナリオから茂みや木、標識などを除外します。レーダーの真正面に道路標識がないことを確認してください。
マップキャリブレーション
物体が動いている場所を見やすくするために、平面図や航空写真など、レーダーがカバーしている範囲を示す参照マップをアップロードすることができます。
- 画像の要件は以下のとおりです。
サポートされるファイル形式は、jpegとpngです。
画像はレーダーでトリミングすることができます。
キャリブレーション中にレーダーの到達範囲の形状が画像に合わせて移動するため、向きは重要ではありません。
[Radar (レーダー)] > [Map calibration (マップのキャリブレーション)] に移動し、設定アシスタントに従ってマップをアップロードし、キャリブレーションを行います。
レーダーの設定の詳細については、axis.comでお使いのレーダーのドキュメントを参照してください。
レーダープロファイルの選択
Axisレーダーはエリア監視または道路監視に使用できます。それぞれのシナリオ用に最適化された2つのプロファイルがあります。
Area monitoring profile (エリア監視プロファイル): 低速度で移動する人、車両、不明な物体を追跡します。
Road monitoring profile (道路監視プロファイル): 主に高速度で移動する車両を追跡します。
プロファイルを選択するには、レーダーのwebインターフェースの [Radar > Settings > Detection (レーダー > 設定 > 検知)] に移動します。
検知範囲、設置例、および使用事例については、以下の各装置のユーザーマニュアルを参照してください。
シナリオの追加
シナリオを追加して、レーダーのトリガー条件と検知設定を定義します。シナリオはAXIS Speed Monitorにインポートされます。
- シナリオを追加する:
レーダーのwebインターフェースで、[Radar > Scenarios (レーダー > シナリオ)] に移動します。
[Add scenario (シナリオの追加)] をクリックします。
シナリオの名前を入力します。
物体がエリアに侵入した場合にトリガーするか、1本または2本のラインを横切った場合にトリガーするかを選択します。
- エリア内で動く物体でトリガーする:
[Movement in area (エリアへの侵入)] を選択します。
[Next (次へ)] をクリックします。
シナリオに含めるゾーンのタイプを選択します。
レーダー画像または参照マップの目的の部分が覆われるように、マウスを使用してゾーンを移動し、形状を設定します。
[Next (次へ)] をクリックします。
検知設定を追加します。
[Ignore short-lived objects (一時的な物体を無視)] で、トリガーを発動するまでの秒数を追加します。
[Trigger on object type (物体タイプでトリガー)] で、トリガーを発動する物体のタイプを選択します。
[Speed limit (速度制限)] で、速度制限の範囲を追加します。
[Next (次へ)] をクリックします。
[Minimum trigger duration (最小トリガー継続時間)] でアラームの最小継続時間を設定します。
[保存] をクリックします。
- ラインを横断する物体でトリガーする:
[Line crossing (ライン横断)] を選択します。
[Next (次へ)] をクリックします。
シーン内にラインを配置します。
マウスを使用して、ラインを移動したり形状を変更したります。
検知方向を変更するには、[Change direction (方向の変更)] をオンにします。
[Next (次へ)] をクリックします。
検知設定を追加します。
[Ignore short-lived objects (一時的な物体を無視)] で、トリガーを発動するまでの秒数を追加します。
[Trigger on object type (物体タイプでトリガー)] で、トリガーを発動する物体のタイプを選択します。
[Speed limit (速度制限)] で、速度制限の範囲を追加します。
[Next (次へ)] をクリックします。
[Minimum trigger duration (最小トリガー継続時間)] でアラームの最小継続時間を設定します。
デフォルト値は2秒に設定されています。物体がラインを横切るたびにシナリオをトリガーする場合は、継続時間を0秒にします。
[保存] をクリックします。
- 2本のラインを横切る物体でトリガー:
[Line crossing (ライン横断)] を選択します。
[Next (次へ)] をクリックします。
物体が2本のラインを横切ったときにアラームがトリガーされるようにするには、[Require crossing of two lines (2本のラインを横断することが必要)] をオンにします。
シーン内にラインを配置します。
マウスを使用して、ラインを移動したり形状を変更したります。
検知方向を変更するには、[Change direction (方向の変更)] をオンにします。
[Next (次へ)] をクリックします。
検知設定を追加します。
[Max time between crossings (ライン横断間の最大時間)] で、最初のラインを横切ってから2番目のラインを横切るまでの最大時間を設定します。
[Trigger on object type (物体タイプでトリガー)] で、トリガーを発動する物体のタイプを選択します。
[Speed limit (速度制限)] で、速度制限の範囲を追加します。
[Next (次へ)] をクリックします。
[Minimum trigger duration (最小トリガー継続時間)] でアラームの最小継続時間を設定します。
デフォルト値は2秒に設定されています。物体が2本のラインを横切るたびにシナリオをトリガーする場合は、継続時間を0秒にします。
[保存] をクリックします。
アプリケーションのダウンロードとインストール
アプリケーションをインストールするには、axis.com/products/axis-speed-monitorに移動し、最新のバージョンをダウンロードします。レーダーに接続するカメラにログインするか、レーダーに直接ログインし、以下の手順に従います。
[Apps] (アプリ) に移動します。
[Add app (アプリの追加)] をクリックします。
ダウンロードフォルダー内のファイルを選択します。
[インストール] をクリックします。
アプリを起動すると、アプリがアクティブ化されます。
アプリケーションをアップグレードするには、最新のバージョンをインストールするだけです。以前のバージョンをアンインストールする必要はありません。
アプリケーションの設定
カメラと接続されたレーダーの時刻および日付をNTPサーバーと同期させます。日時が同期されていない場合、エクスポートした統計情報に正しい情報が表示されず、カメラで設定したAXIS Speed Monitorイベントが正しくトリガーされないことがあります。
カメラのwebインターフェースで次の操作を行います。
[Apps] (アプリ) に移動します。
[AXIS Speed Monitor] に移動し、[Open (開く)] をクリックします。
- 注
レーダービデオ融合カメラでは、統合型のレーダーがカメラに自動的に接続します。
[Connect to radar (レーダーに接続)] に移動します。
レーダーのアドレスと、ユーザー名およびパスワードを入力します。
[接続] をクリックします。
- レーダー内で設定されたシナリオは、AXIS Speed Monitorにインポートされます。
オーバーレイを追加するには、シナリオをクリックし、パラメーターを追加して編集します。
以下のパラメーターおよび対応するオーバーレイを追加できます。
#n: シナリオの名前。
#M: シナリオ内で最速で動く物体のライブ速度測定。
#c: 過去15分間に通過した車両の台数。
#a: 過去15分間の平均速度。
ライブビュー内でオーバーレイを移動するには、オーバーレイをクリックしてドラッグアンドドロップします。
ライブビューからオーバーレイを削除するには、対応するオーバーレイパラメーターを削除します。
レーダーシナリオの名前を変更するには、レーダーのwebインターフェースで [Radar > Scenarios (レーダー > シナリオ)] に移動します。編集するシナリオの名前をクリックします。
統計情報のエクスポート
このアプリケーションは、カンマ区切りファイル (csv) としてダウンロードできる統計情報を記録します。当日または設定した日付範囲の統計情報をダウンロードできます。エクスポートファイルには、範囲内で検知されたすべての動く物体、それらの物体が特定のレーダーシナリオに入った時間、またはそのシナリオから出た時間が含まれます。
レーダー追跡情報を記録できるようにするには、アプリがインストールされている装置にSDカードを装着します。
MQTTを介して、レーダー追跡データを送信することもできます。詳細については、を参照してください。
- ファイル内のパラメーター:
rmd_zone name:シナリオの名前。
tracking_id: レーダーメタデータストリームのオブジェクトID。レーダーを再起動すると、カウンターは1にリセットされます。
trigger_count: シナリオにアクティブな追跡物体がある間にシナリオがトリガーされた回数。
object_class: 使用可能な物体クラスは、「Human (人物)」、「Vehicle (車両)」、および「Unknown (不明)」です。シナリオでカウントするクラスを選択します。
weekday:track_idがシナリオに入った曜日。
date:track_idがシナリオに入った日付。
time:track_idがシナリオに入った時刻 (HH:MM:SS)。
duration:track_idがシナリオ内に滞在した時間。秒数で表示されます。
enter_bearingおよびexit_bearing: 物体が最初にシナリオに入ったときとシナリオから出たときに向いていた方角。bearingは度単位で表示され、レーダーメタデータと同じ規則に従います。
enter_directionおよびexit_direction:「departing (離脱)」、「rightwards (右方向)」、「approaching (接近)」、「leftwards (左方向)」などのテキストによる動きの説明。
min_speed、avg_speed、max_speed: シナリオ内にある間に物体が移動した最低速度、平均速度、最高速度。地域の設定に応じて、キロメートル毎時 (km/h) またはマイル毎時 (mph) で表示されます。
speed_delta 物体がシナリオから出たときの速度と、シナリオに入ったときの速度との差。地域の設定に応じて、キロメートル毎時 (km/h) またはマイル毎時 (mph) で表示されます。正の値は加速を意味し、負の値は減速を意味します。
alarm:シナリオ内で物体が許容範囲外の速度で移動したかどうかを示します。0はある地点における許容範囲内の速度、1は許容範囲外の速度を意味します。
MQTTを使用してレーダーデータを送信する
統計情報のエクスポートに示されているレーダー追跡データをMQTTを介して送信できます。
この例では、AXIS Speed Monitorをインストールした装置でMQTTクライアントを設定する方法と、AXIS Speed Monitorで収集したレーダーデータをペイロードとしてMQTTブローカーにパブリッシュする条件を作成する方法について説明します。
- 開始する前に、以下をご確認ください。
MQTTブローカーを設定し、ブローカーのIPアドレス、ユーザー名、パスワードを取得します。
MQTTおよびMQTTブローカーの詳細については、AXIS OS knowledge base (AXIS OS知識ベース)を参照してください。
- AXIS Speed Monitorをインストールした装置のwebインターフェースで、以下のようにMQTTクライアントを設定します。
[System (システム)] > [MQTT] > [MQTT client (MQTTクライアント)] > [Broker (ブローカー)] に移動し、次の情報を入力します。
[ホスト]:ブローカーのIPアドレス
Client ID (クライアントID): 装置のID
Protocol (プロトコル):ブローカーが設定したプロトコル
ポート:ブローカーが使用するポート番号
ブローカーの Username (ユーザー名) と Password (パスワード)
[ Save (保存) ]をクリックし、[ Connect (接続) ]をクリックします。
- 以下のように、レーダーデータをペイロードとしてMQTTブローカーにパブリッシュする条件を作成します。
[System > MQTT > MQTT publication (システム > MQTT > MQTTパブリッシュ)] に移動し、[+ Add condition (+ 条件の追加)] をクリックします。
[Application (アプリケーション)] の条件のリストで、[Speed Monitor: Track exited zone (Speed Monitor: 出たゾーンを追跡)] を選択します。
これで、装置はシナリオから出る動く物体ごとにレーダー航跡に関する情報を送信できます。すべての物体には、[rmd_zone_name]、[tracking_id]、[trigger_count] などの独自のレーダー航跡パラメーターがあります。レーダー航跡パラメーターの全リストについては、統計情報のエクスポートを参照してください。
MQTTペイロードでは、[min_speed]、[avg_speed]、[max_speed]、[speed_delta] などのパラメーターは、km/hまたはmph単位ではなく、メートル/秒 (m/s) 単位でのみ利用できます。
イベントのルールを設定する
詳細については、「イベントのルールの使用開始」を参照してください。
アクションをトリガーする
[System > Events (システム > イベント)] に移動し、ルールを追加します。このルールでは、装置が特定のアクションを実行するタイミングを定義します。ルールは、スケジュールや繰り返しとして設定することも、手動でトリガーするように設定することもできます。
[Name (名前)] に入力します。
アクションをトリガーするために満たす必要がある [Condition (条件)] を選択します。ルールに複数の条件を指定した場合は、すべての条件が満たされたときにアクションがトリガーされます。
条件が満たされたら実行するAction (アクション) を選択します。
- アクティブなルールを変更する場合は、ルールを再度オンにして変更内容を有効にする必要があります。
レーダーで速度違反を検知したらストロボサイレンを作動させる
Axisのストロボサイレンを使用すると、速度違反者に敷地周辺が保護されていることを知らせることができます。
この例では、接続されたレーダーを使用してAXIS Speed Monitorが速度違反を検知したときに、ストロボサイレンのプロファイルを開始する方法について説明します。
- 要件
ストロボサイレンにオペレーター、または管理者のロールを持つ新しいユーザーを作成します。
ストロボサイレンに2つのプロファイルを作成します。1つはドライバーが許容速度内で走行しているとき用、もう1つは速度制限に違反しているとき用です。
カメラでのAXIS Speed Monitorの設定
接続されたレーダーに「Area 1」というシナリオを追加します。
- カメラで2人の送信先を作成する
カメラのwebインターフェースで [System > Events > Recipients (システム > イベント > 送信先)] に移動し、送信先を追加します。
以下の情報を入力します。
名前:Activate virtual port (仮想ポートのアクティブ化)
Type (タイプ): HTTP
URL: http://<IPaddress>/axis-cgi/virtualinput/activate.cgi
<IPaddress>の部分をストロボサイレンのアドレスに置き換えます。
新しく作成されたストロボサイレンのユーザーのユーザー名とパスワードです。
[Test (テスト)] をクリックして、すべてのデータが有効であることを確認します。
[保存] をクリックします。
次の情報を含む2番目の送信先を追加します。
名前:仮想ポートの非アクティブ化
Type (タイプ): HTTP
URL: http://<IPaddress>/axis-cgi/virtualinput/deactivate.cgi
<IPaddress>の部分をストロボサイレンのアドレスに置き換えます。
新しく作成されたストロボサイレンのユーザーのユーザー名とパスワードです。
[Test (テスト)] をクリックして、すべてのデータが有効であることを確認します。
[保存] をクリックします。
- カメラに2つのルールを作成する
[Rules (ルール)] に移動し、ルールを追加します。
以下の情報を入力します。
名前:仮想IO1のアクティブ化
Condition (条件): Applications (アプリケーション) > Speed Monitor: Area 1
Action (アクション): Notifications > Send notification through HTTP (通知 > HTTPで通知を送信する)
Recipient (送信先): Activate virtual port (仮想ポートのアクティブ化)
Query string suffix (クエリ文字列のサフィックス): schemaversion=1&port=1
[保存] をクリックします。
次の情報を含む別のルールを追加します。
名前:仮想IO1の非アクティブ化
Condition (条件): Applications (アプリケーション) > Speed Monitor: Area 1
Action (アクション): Notifications > Send notification through HTTP (通知 > HTTPで通知を送信する)
Recipient (送信先): 仮想ポートの非アクティブ化
Query string suffix (クエリ文字列のサフィックス): schemaversion=1&port=1
[保存] をクリックします。
- ストロボサイレンにルールを作成する
ストロボサイレンの装置インターフェースで、[System > Events (システム > イベント)] に移動し、ルールを追加します。
以下の情報を入力します。
名前:仮想入力1のトリガー
Condition (条件): I/O > Virtual input (仮想入力)
ポート:1
Action (アクション): Light and siren > Run light and siren profile while the rule is active (ライトとサイレン > ルールがアクティブである間は、ライトとサイレンのプロファイルを実行)
Profile (プロファイル): 新しく作成したプロファイルを選択します
[保存] をクリックします。
統合
AXIS Camera Stationのユーザー向け
AXIS Speed Monitorの設定
AXIS Speed Monitorアプリは、レーダーに接続された装置、またはレーダーに直接設置された装置にインストールできます。
装置またはレーダーがAXIS Speed Monitorで設定されている場合、その装置はAXIS Camera Stationの外部データソースとみなされます。ビューをデータソースに接続し、装置でキャプチャーされた物体の速度を検索して関連する画像を表示できます。
アプリケーションをダウンロードして装置にインストールします。
アプリケーションとレーダーを設定します。AXIS Speed Monitorユーザーマニュアルを参照してください。
既存のAXIS Camera Stationインストールの場合は、クライアントとの通信に使用されるサーバー証明書を更新します。証明書の更新を参照してください。
時刻同期をオンにして、AXIS Camera StationサーバーをNTPサーバーとして使用します。サーバーの設定を参照してください。
関連する装置をAXIS Camera Stationに追加します。装置の追加を参照してください。
レーダーに接続された装置にアプリがインストールされている場合は、装置とレーダーを追加します。
アプリがレーダーにインストールされている場合は、レーダーを追加します。
最初のイベントを受信すると、データソースは [Configuration > Devices > External data sources (設定 > デバイス > 外部データソース)] の下に自動的に追加されます。
データソースをビューに接続します。外部データソースを参照してください。
装置によってキャプチャーされた物体の速度を検索します。「データ検索」を参照してください。
 をクリックして、検索結果を.txtファイルにエクスポートします。
をクリックして、検索結果を.txtファイルにエクスポートします。
Milestone Xprotectユーザー向け
AXIS Optimizer for Milestone Xprotect®には、ゾーン速度検索という機能があります。この機能はAXIS Speed Monitorと連携して、カメラのライブビュー内のレーダー検知ゾーン内の車両の速度を可視化します。
ゾーン速度検索を使用すると、カメラのビュー内の所定のゾーンに入ったときに検知された速度違反車両を検索できます。詳細については、AXIS Optimizerユーザーマニュアルのゾーン速度検索を参照してください。