레이더-영상 융합 카메라는 레이더 모듈이 완전히 통합된 비주얼 카메라입니다. 따라서 레이더와 비디오를 별도로 또는 결합하여 객체를 감지하고 분류할 수 있습니다.
레이더-영상 융합의 이점은 더 정확한 감지 및 분류가 가능하고 허위 알람 및 누락된 알람을 줄인다는 것입니다. 두 기술의 융합은 레이더-영상 융합에 액세스하고 구성하는 데 사용되는 기본 인터페이스인 AXIS Object Analytics에서 함께 제공됩니다.
AXIS Q1656-DLE는 깊이가 있는 넓은 영역의 객체를 감지 및 분류하여 영역 모니터링이나 도로 모니터링에 사용할 수 있습니다. AXIS Q1656-DLE는 다른 장치와 결합된 사이트 디자인에서도 잘 작동합니다. 레이더 감지 범위는 AXIS Q1656-DLE의 카메라의 화각보다 넓기 때문에 IR 조명이 있는 PTZ 카메라와 결합하여 레이더의 전체 감지 범위에서 시각적 확인이 가능합니다. 또는 길고 좁은 영역에 있는 물체를 감지하고 분류할 수 있는 열상 카메라와 결합할 수도 있습니다.
두 개의 독립형 레이더가 현장의 개방 구역에 적용되고, 네 개의 레이더-영상 융합 카메라가 더 복잡한 개방 구역에 적용되는 건설 현장의 예입니다. 또한 네 개의 열상 카메라는 울타리를 따라 있는 좁은 복도에 적용됩니다.
왜 융합입니까?
자체적으로 사용되는 비디오 및 레이더에는 모두 고유한 강점과 한계가 있습니다.
비디오는 일반적으로 대비가 충분하고 객체가 카메라에 가까이 이동할 때 더 정확한 분류를 제공합니다. 또한 레이더보다 더 세분화된 분류를 제공합니다. 그러나 카메라가 보기 위해서는 좋은 조명 조건이 필요합니다.
반면에 레이더는 열악한 조명 조건에서도 객체를 감지할 수 있으며 감지 및 분류 범위가 더 깁니다. 기상 조건에 관계없이 레이더는 움직이는 객체의 속도와 방향 및 거리를 측정할 수 있습니다. 그러나 시각적 확인이 부족하면 레이더 분류가 더 취약해질 수 있습니다. 흔들리는 객체와 반사 표면은 허위 알람을 유발할 수 있으므로 사이트를 설계하고 레이더를 구성할 때 고려해야 합니다.
레이더-영상 융합 카메라의 두 가지 기술은 물론 자체적으로 사용할 수 있지만 두 기술의 분석이 상호 작용하여 보다 안정적인 감지 및 분류를 제공할 때 더욱 강력해집니다.
레이더-영상 융합에 대해 설명합니다
이 제품은 다음의 두 가지 방법으로 레이더 데이터를 비디오 데이터와 융합합니다.
영상 융합: 레이더 감지 및 분류가 비디오 이미지로 융합됩니다. 이는 비디오 분석을 사용할 수 없을 때 비디오 스트림에서 레이더 데이터를 시각화하는 방법입니다.
예를 들어 객체가 50m(164ft) 거리에 나타나는 경우 너무 작아서 비디오 분석으로 감지하지 못할 수도 있지만, 레이더는 객체를 식별할 수 있습니다. 이 경우 레이더 감지는 영상면에 융합되며 AXIS Object Analytics 내부에서 알람을 트리거하는 데 사용될 수 있습니다.
분석 융합: 레이더 감지 및 분류는 비디오 분석의 감지 및 분류와 융합됩니다. 이렇게 하면 두 기술의 개별 강점이 결합된 통합 분석 출력을 장치에 제공하게 됩니다. 여기에는 레이더에서 가져온 거리와 속도 및 비디오에서 가져온 위치와 등급이 사용됩니다.
위의 예에 있는 객체가 가까워지면 비디오 분석도 이를 감지합니다. 이후에 레이더 감지는 비디오 분석 출력과 융합되어 개별 기술로 제공할 수 있는 것보다 많은 정보와 더 높은 품질의 출력을 생성합니다.
설치
장치의 설치 비디오.
미리 보기 모드
미리 보기 모드는 설치 중 카메라 보기를 미세 조정할 때 설치자에게 이상적입니다. 미리 보기 모드에서 카메라 보기에 액세스하는 데 로그인이 필요하지 않습니다. 장치 전원을 켠 후 제한된 시간 동안 공장 출하 시 기본 설정 상태로만 사용할 수 있습니다.
최상의 비디오 및 레이더 범위를 얻으려면 제품을 적절하게 마운트해야 합니다. 레이더-영상 융합 카메라를 마운트할 때 다음 사항을 고려하십시오.
영역 또는 도로 모니터링
이 제품은 개방된 지역을 모니터링하기 위한 것이며 영역 모니터링이나 도로 모니터링에 사용할 수 있습니다. 설치 예시 및 사용 사례는 영역 설치 및 도로 설치 항목을 참고하십시오.
고체와 반사 객체 방지
고체 및 금속 물체는 AXIS Q1656-DLE의 레이더 성능에 영향을 줄 수 있습니다. 커버리지 영역에 있는 대부분의 고체 물체(예: 벽, 울타리, 나무 또는 큰 수풀)는 그 뒤에 사각 지대(레이더 그림자)를 생성합니다. 화각 내에 있는 금속 객체는 레이더가 분류를 수행하는 능력에 영향을 미치는 반사를 일으킵니다. 이로 인해 레이더 스트림에서 고스트 트랙과 허위 알람이 발생할 수 있습니다.
실제 감지
반사 감지(고스트 트랙)
레이더의 적용 범위에서 고체와 반사 객체를 처리하는 방법에 대한 자세한 내용은 제외 영역 추가 항목을 참고하십시오.
장착 위치
안정적인 폴 또는 다른 객체나 설치물이 없는 벽면에 제품을 설치합니다. 제품의 좌우 1m(3ft) 내에 있으며 전파를 반사하는 객체는 AXIS Q1656-DLE의 레이더 성능에 영향을 미칩니다.
제품을 벽에 설치하는 경우 벽과 최소 15° 각도를 유지해야 합니다.
또한 장착 높이는 비디오와 레이더의 감지 거리와 범위에 영향을 미칩니다.
틸트 각도
이미지의 중심이 지평선 아래에 있도록 제품이 지면을 향하게 방향을 충분히 조정해야 합니다. 권장 마운트 틸트는 15~45°입니다.
제품의 롤 각도는 0과 거의 같아야 합니다. 즉, 이미지가 수평선과 수평을 이루어야 합니다.
공존
60GHz 주파수 대역에서 작동하는 8개 이상의 레이더 또는 레이더-영상 융합 카메라를 서로 가깝게 마운트하면 서로 간섭할 수 있습니다. 간섭을 방지하려면, 여러 개의 Axis 레이더 장치 설치 항목을 참조하십시오.
여러 개의 Axis 레이더 장치 설치
공존
AXIS Q1656-DLE 레이더의 전파는 감지 영역을 벗어나 계속 진행하며 최대 350m(380yd) 떨어진 다른 레이더에 간섭을 일으킬 수 있습니다. 이것을 공존 영역이라고 합니다.
융합 카메라
감지 영역
공존 구역
AXIS Q1656-DLE는 60GHz 주파수 대역에서 작동합니다. 60GHz 주파수 대역에서 작동하는 최대 8개의 Axis 레이더 또는 레이더-영상 융합 카메라를 서로 가까이 또는 서로 마주보게 설치하여 문제 없이 설치할 수 있습니다. 내장된 공존 알고리즘은 간섭을 최소화하는 적절한 시간 슬롯과 주파수 채널을 찾을 수 있습니다.
동일한 주파수 대역에서 작동하는 8개가 넘는 레이더 장치가 설치되어 있고 많은 장치가 서로 멀리 떨어져 있는 경우 간섭 위험이 줄어듭니다. 일반적으로 레이더 작동은 레이더 간섭으로 인해 중지되지 않습니다. 간섭이 있는 경우에도 레이더 신호를 복구하려고 시도하는 간섭 완화 알고리즘이 내장되어 있습니다. 동일한 공존 구역, 동일한 주파수 대역에서 많은 레이더가 작동하는 환경에서는 간섭에 대한 경고가 발생할 것으로 예상됩니다. 간섭의 주요 영향은 감지 성능 저하와 간헐적인 고스트 트랙입니다.
AXIS Q1656-DLE 네 쌍이 나란히 마운트되어 있습니다.
공존을 고려할 필요 없이 다른 주파수 대역에서 작동하는 Axis 레이더와 레이더-영상 융합 카메라를 결합할 수 있습니다. 서로 다른 주파수 대역에서 작동하는 Axis 레이더 장치는 서로 간섭하지 않습니다.
레이더 범위
AXIS Q1656-DLE의 레이더는 수평 감지 범위가 95°입니다. 레이더의 감지 범위는 장면, 제품의 장착 높이 및 틸트 각도, 움직이는 객체의 크기와 속도 등의 요인에 따라 달라집니다.
감지 범위는 선택한 monitoring profile(모니터링 프로파일)에 따라 달라집니다. 영역 또는 도로 모니터링에 대해 AXIS Q1656-DLE를 사용할 수 있으며, 레이더에는 각 시나리오에 최적화된 두 가지 프로파일이 있습니다.
Area monitoring profile(영역 모니터링 프로파일): 레이더는 55km/h(34mph) 미만의 속도로 움직이는 사람, 차량 및 미확인 객체를 추적하고 분류합니다. 감지 범위에 대한 정보는 영역 감지 범위 항목을 참고하십시오.
Road monitoring profile(도로 모니터링 프로파일): 레이더는 주로 최대 200km/h(125mph)의 속도로 움직이는 차량을 추적하고 분류합니다. 감지 범위에 대한 정보는 도로 감지 범위 항목을 참고하십시오.
비고
레이더와 비디오를 AXIS Object Analytics에 결합하면 AXIS Q1656-DLE는 차량 하위 클래스(버스, 자동차, 자전거, 트럭 등)를 분류할 수 있습니다.
제품의 웹 인터페이스에서 영역 또는 모니터링 프로파일을 선택합니다. 자세한 내용은 레이더 프로파일을 선택합니다. 항목을 참조하십시오.
커버리지 범위
이 장치의 레이더의 수평 감지 범위는 95°입니다. 커버리지 영역은 사람의 경우 2700m2(29000ft2)에 해당하고 차량의 경우 6100m2(65600ft2)에 해당합니다.
비고
제품이 3.5~7m(11~23ft)에 마운팅된 경우 최적의 영역 범위가 적용됩니다. 장착 높이는 레이더 아래의 사각지대 크기에 영향을 미칩니다.
영역 감지 범위
영역 모니터링 프로파일은 사람을 감지하고 추적하도록 최적화되어 있지만 차량 및 기타 느리게 움직이는 객체도 추적할 수 있습니다.
최적의 설치 높이에 장착했을 때 감지 범위는 다음과 같습니다.
사람의 경우 5~60m(16~200ft)
차량의 경우 5~90m(16~300ft)
영역 모니터링 프로필 사용 시 사람 및 차량의 감지 범위
비고
레이더를 보정할 때 웹 인터페이스에서 장착 높이를 입력합니다.
감지 범위는 현장 상황과 장치의 틸트 각도에 따라 달라질 수 있습니다.
감지 범위는 움직이는 객체의 유형과 크기에 따라 달라질 수 있습니다.
레이더 감지 범위는 다음 조건에서 측정되었습니다.
범위는 지면을 따라 측정되었습니다.
객체는 키가 170cm(5피트 7인치)였습니다.
그 사람은 레이더 앞에서 똑바로 걷고 있었습니다.
사람이 감지 영역에 들어갈 때 값이 측정되었습니다.
레이더 감도는 Medium(중간)으로 설정되었습니다.
장착 높이
15° 틸트
20° 틸트
25° 틸트
30° 틸트
35° 틸트
40° 틸트
45° 틸트
3.5m (11ft)
6.0~60+ m (19~196+ ft)
5.0~60+ m (16~196+ ft)
4.0~60+ m (13~196+ ft)
4.0~60m (13~196ft)
4.0~55m (13~180ft)
4.0~40m (13~131ft)
4.0~30m (13~98ft)
4.5m (14ft)
6.0~60+ m (19~196+ ft)
6.0~60+ m (19~196+ ft)
5.0~60+ m (16~196+ ft)
4.0~60+ m (13~96+ ft)
4.0~60m (13~196ft)
4.0~45m (13~147ft)
4.0~40m (13~131ft)
6m (19ft)
10~60+ m (32~196+ ft)
9.0~60+ m (29~196+ ft)
7.0~60+ m (22~196+ ft)
6.0~60+ m (19~196+ ft)
6.0~60m (19~196 ft)
5.0~55m (16~180ft)
5.0~55m (16~180ft)
8m (26ft)
16~60m (52~196ft)
14~60m (45~196ft)
10~60m (32~196ft)
8.0~60+ m (26~196+ ft)
8.0~60+ m (26~196+ ft)
7.0~60m (22~196ft)
7.0~60m (22~196ft)
10m (32ft)
21~60m (68~196ft)
19~60m (62~196ft)
14~60m (45~196ft)
12~60+ m (39~196+ ft)
10~60+ m (32~196+ ft)
9.0~60m (29~196ft)
9.0~60m (29~196ft)
12m (39ft)
25~60m (82~196ft)
23~60m (75~196ft)
19~60m (62~196ft)
16~60+ m (52~196+ ft)
13~60+ m (42~196+ ft)
11~60m (36~196ft)
11~55m (36~180ft)
비고
레이더 감도를 Low(낮음)로 설정하면 감지 범위가 20% 감소하고 High(높음)로 설정하면 감지 범위가 20% 증가합니다.
작은 동물이 융합 영역 외부에 나타날 것으로 예상되지만 여전히 레이더의 감지 영역에 있는 설치에서는 레이더 감도를 Low(낮음)로 설정하여 허위 알람을 최소화할 수 있습니다. 그러나 이렇게 하면 감지 범위가 줄어듭니다.
도로 감지 범위
road monitoring profile(도로 모니터링 프로파일)은 차량 감지에 최적화되어 있으며 최대 200km/h(125mph)의 속도로 움직이는 차량을 모니터링할 때 속도 오차는 +/-2km/h(1.24mph)입니다.
레이더-영상 융합 카메라의 장착 높이와 차량 속도는 레이더 감지 범위에 영향을 미칩니다. 최적의 설치 높이에 마운트되면 레이더는 다음 범위 내에서 +/-2km/h(1.24mph)의 속도 정확도로 접근 및 출발 차량을 감지합니다.
50km/h(31mph)로 이동하는 차량의 경우 25 ~ 100m(82 ~ 328ft).
100km/h(62mph)로 이동하는 차량의 경우 40 ~ 80m(131 ~ 262ft).
200km/h(125mph)로 이동하는 차량의 경우 50 ~ 70m(164 ~ 230ft).
비고
고속으로 이동하는 차량을 감지하지 못하는 위험을 최소화하려면 Vehicle(차량) 및 Unknown(알 수 없음) 객체 유형에서 트리거되는 레이더 시나리오를 설정하십시오. 시나리오 설정 방법에 대한 자세한 내용은 시나리오 추가 항목을 참고하십시오.
레이더-영상 융합 범위
두 기술로 객체를 감지하고 분류할 수 있는 영역인 분석 융합 영역은 다음과 같은 요인에 따라 달라집니다.
카메라의 설치 높이입니다.
카메라의 틸트 각도입니다.
카메라 렌즈의 줌 수준입니다.
주변 환경의 조명 조건, 카메라 자체 및 현장의 다른 장치에서 제공하는 조명의 조건.
움직이는 객체까지의 거리.
레이더-영상 융합 카메라가 설치되면 레이더 범위가 고정됩니다. 그러나 카메라의 화각은 렌즈의 줌 레벨에 따라 다릅니다.
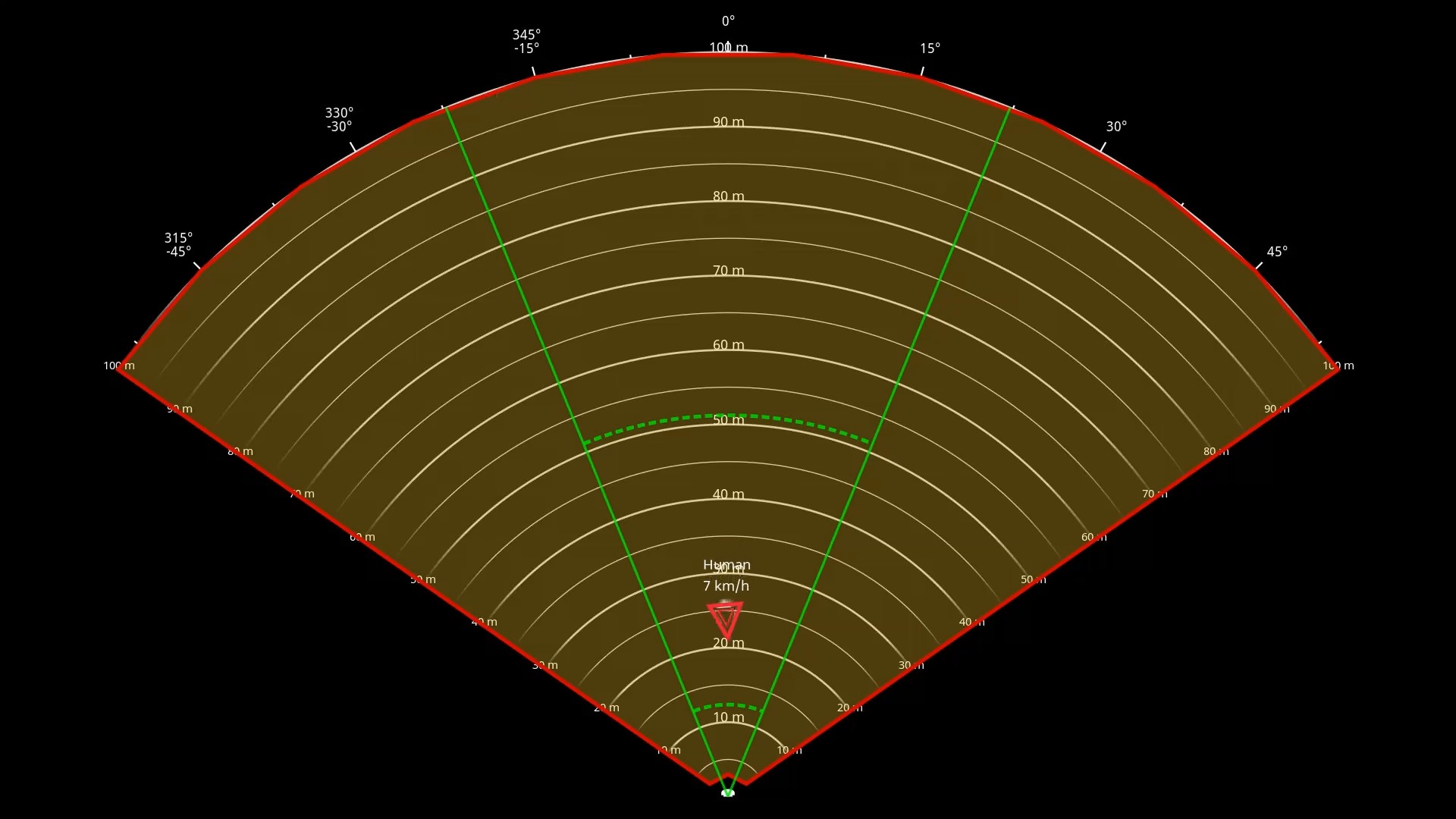
레이더 범위와 관련하여 카메라의 화각을 시각화하기 위해 카메라의 대략적인 화각을 나타내는 레이더 스트림에 두 개의 녹색 선이 있습니다. 카메라가 확대 또는 축소되면 선이 조정됩니다. 또한 카메라가 볼 수 있는 대략적인 영역을 나타내는 두 개의 점선이 있습니다. 장치에 가까운 점선은 근거리 감지 한도를 나타내고 멀리 있는 점선은 원거리 감지 한도를 나타냅니다.
녹색 실선은 카메라의 대략적인 화각을 나타내고 녹색 점선은 대략적인 근거리 및 원거리 감지 한도를 나타냅니다.
줌 레벨의 예
분석 융합 영역의 크기는 AXIS Q1656-DLE에서 렌즈의 줌 레벨의 영향을 받습니다. 줌 레벨의 두 가지 극단은 아래에 설명되어 있습니다.
Lens zoomed out (max wide)(렌즈 줌-아웃(최대 너비))
AXIS Q1656-DLE의 렌즈가 최대로 축소되면 객체가 너무 작아져 비디오 분석에서 감지할 수 없습니다. 이 시나리오에서는 객체가 넓은 범위의 레이더에 의해 감지되지만 비디오 분석에서는 감지되지 않을 가능성이 높습니다. 레이더의 전체 감지 범위에서 시각적 확인을 설정하려면 AXIS Q1656-DLE를 하나 이상의 PTZ 카메라와 페어링하면 됩니다.
Lens zoomed in (max tele)(확대된 렌즈(최대 망원))
렌즈를 최대로 확대하면 카메라의 화각이 크게 제한됩니다. 하지만 렌즈를 최대로 축소했을 때보다 멀리 있는 객체가 확대되기 때문에 훨씬 먼 거리에서도 비디오 분석으로 객체를 감지할 수 있습니다. 이 시나리오에서는 객체가 비디오 분석에 의해 감지되지만 레이더 분석에 의해 감지되지 않을 수 있습니다.
레이더와 비디오 분석 모두에서 객체를 정확하게 분류할 가능성을 최대화하려면 가능하면 관심 영역의 객체가 비디오 분석에서 감지할 수 있을 만큼 충분히 커지도록 줌을 조정합니다.
레이더 비디오 감지 및 분류
AXIS Q1656-DLE가 레이더와 비디오 또는 기술 중 하나를 사용하여 물체를 감지하고 분류할 수 있으므로 알아야 할 몇 가지 사항이 있습니다.
두 사람이 가까이 걸어가다가 레이더에 감지되지만 비디오 분석에서는 감지되지 않으면 한 사람으로 분류되어 한 개의 바운딩 박스만 둘러쌉니다. 분석 융합 영역에 진입하여 시각적 확인이 이루어지면 정확하게 분류됩니다. AXIS Q1656-DLE에서 레이더의 공간적 차이는 3m(9ft)입니다.
객체가 카메라의 화각 밖에 있으면 AXIS Q1656-DLE는 감지 또는 분류를 이미지 평면에 융합할 수 없습니다. 이는 AXIS Object Analytics가 알람을 트리거할 수 없음을 의미합니다. 레이더에서만 객체가 감지될 때 알람을 트리거하려면 레이더 웹 인터페이스에서 시나리오를 구성하고 조건을 사용하여 레이더 시나리오 내에서 모션을 트리거합니다.
레이더 웹 인터페이스에 추가하는 제외 구역은 전역적이며, 제외 구역이 AXIS Object Analytics의 분석 융합 영역과 오버랩하는 경우 이 영역에서 감지된 모션은 항상 무시됩니다. 단 AXIS Object Analytics에 추가하는 제외 구역은 AXIS Object Analytics 시나리오의 모션만 무시합니다.
영역 설치
영역 설치 시 최상의 레이더 성능을 얻으려면 AXIS Q1656-DLE의 area monitoring profile(영역 모니터링 프로파일)을 선택합니다. 자세한 내용은 레이더 프로파일을 선택합니다.을 참조하십시오.
영역 설치 예
예를 들어 건물을 따라 또는 주변에 가상 울타리를 생성하기 위해 여러 레이더-영상 융합 카메라를 나란히 배치할 수 있습니다.
180° 레이더 범위를 확보하려면 두 개의 AXIS Q1656-DLE를 나란히 배치합니다. 두 쌍 이상의 레이더-영상 융합 카메라를 나란히 설치할 경우, 예와 같이 각 쌍 사이에 100m(330ft) 간격을 두고 배치하는 것이 좋습니다.
AXIS Q1656-DLE 네 쌍이 나란히 마운트되어 있습니다.
레이더 간 간섭 없이 최대 8대의 레이더-영상 융합 카메라를 서로 가깝게 설치할 수 있습니다. Axis 레이더 장치를 서로 가깝게 배치하는 방법에 대한 자세한 내용은 여러 개의 Axis 레이더 장치 설치 항목을 참고하십시오.
영역 모니터링 사용 사례
건물 주변 노지 포함
사무실 건물에 있는 회사는 특히 근무 시간 이후, 주말 및 공휴일에 침입과 기물 파손으로부터 건물을 보호해야 합니다. 건물 주변 지역을 감시하기 위해 레이더-영상 융합 카메라와 PTZ 카메라를 함께 설치합니다. 사람과 차량이 건물에 접근할 때 알람을 트리거하도록 레이더-영상 융합 카메라를 구성합니다. 최대한 신뢰할 수 있는 감지 및 분류를 위해 AXIS Object Analytics에서 해당 영역에 적합한 디텍션 감도를 선택합니다. 디텍션 감도에 대한 내용은 디텍션 감도 선택 항목을 참고하십시오.
레이더의 전체 감지 범위에서 잠재적인 침입자를 시각적으로 확인하기 위해 건물 반대쪽 모서리에 IR이 내장된 PTZ 카메라 두 대를 추가했습니다. 레이더는 AXIS Radar Autotracking for PTZ를 통해 PTZ 카메라를 조종하며 내장 IR 조명은 레이더-영상 융합 카메라에 더 많은 빛을 제공하여 더 먼 거리에서도 침입자를 감지하고 식별할 수 있습니다.
울타리가 있는 건물 포함
일반적으로 구내에 물품을 보관하는 창고는 침입자를 막기 위해 울타리로 둘러싸여 있습니다. 잠재적인 침입자를 감지하기 위해 레이더-영상 융합 카메라와 IR이 내장된 PTZ 카메라를 함께 설치하여 건물을 보호합니다. 레이더-영상 융합 카메라는 안정적인 감지 및 트리거 알람을 제공하는 반면, PTZ 카메라는 시각적 범위를 확장합니다. IR이 내장된 PTZ 카메라는 레이더-영상 융합 카메라에 더 많은 빛을 제공하므로 더 먼 거리에 있는 침입자를 감지하고 식별할 수 있습니다.
이 장면에서 울타리 밖의 영역은 허위 알람을 트리거할 수 있는 혼잡한 영역이므로 포함되지 않습니다. 활동이 적은 장면에서는 울타리 외부 영역도 포함될 수 있습니다. 이러한 장면에서는 잠재적인 침입자를 방지하기 위해 울타리 밖에서 움직임이 감지되면 외부 조명을 트리거하도록 카메라를 구성할 수 있습니다. 울타리 내부에서 침입자가 실제로 감지되면 알람이 트리거될 수도 있습니다. 울타리 밖의 움직임을 감지하려면 카메라를 충분히 높이 설치해야 합니다.
중요 자산 포함
중요한 장비와 케이블이 있는 통신 대피소는 침입자를 차단하기 위해 울타리로 둘러싸여 있습니다. 탬퍼링 및 방해 행위를 방지하려면 추가 보호가 필요합니다. 허위 알람을 최소한으로 유지하는 것이 중요하기 때문에 현장 반대편 모서리에 두 대의 레이더-영상 융합 카메라를 설치합니다. 카메라는 대피소, 안테나 및 부지를 함께 포함할 수 있습니다. 레이더-영상 융합 카메라에 레이더와 비디오 기술을 모두 사용하면 카메라는 잠재적인 침입자를 안정적으로 감지하고 분류할 수 있습니다.
이런 방식으로 레이더-영상 융합 카메라를 레이더 간 간섭 없이 서로 마주보게 배치할 수 있습니다. 단, 비디오 기술이 정확한 감지 및 분류를 제공할 수 있으려면 빛 상태가 양호해야 합니다.
적재 베이 주변 영역 포함
상업용 건물의 적재 베이는 구내를 보호하기 위해 울타리로 둘러싸여 있습니다. 회사는 보안을 강화하기 위해 현장에 열상 카메라 한 대와 레이더-영상 융합 카메라 세 대를 설치했습니다. 잠재적인 침입자를 감지하기 위해 울타리를 따라 열상 카메라를 설치합니다. 울타리를 통과한 침입자를 감지하기 위해 상하차 공간을 향한 기둥에 레이더-영상 융합 카메라 두 대를 설치합니다. 이 카메라는 상하차 공간 주변을 이동하는 사람과 차량을 감지하고 분류할 수 있으며, 근무 시간 후에 알람을 트리거할 수 있습니다. 전환점이 오른쪽인 해당 영역을 통과하는 침입자를 감지하기 위해 해당 영역을 향하는 추가 레이더-영상 융합 카메라를 설치합니다. 마지막으로 열상 카메라는 울타리 근처에 설치된 카메라 두 대의 탬퍼링 시도를 감지하는 데에도 도움이 될 수 있습니다.
도로 설치
도로 설치 시 최상의 레이더 성능을 얻으려면 AXIS Q1656-DLE의 road monitoring profile(도로 모니터링 프로파일)을 선택합니다. 자세한 내용은 레이더 프로파일을 선택합니다.을 참조하십시오.
도로 설치 예
도로 및 고속도로를 모니터링할 때는 차량 뒤의 사각 지대(레이더 그림자)가 생기지 않도록 레이더-영상 융합 카메라를 충분한 높이에 마운트하십시오.
비고
레이더 그림자의 크기는 레이더-영상 융합 카메라의 마운트 높이와 차량 높이 및 레이더로부터의 거리에 따라 달라집니다. 예를 들어 4.5m(15ft) 높이의 차량이 50 m(164ft) 높이에 마운트된 레이더-영상 융합 카메라에서 8m(26ft) 떨어져 있는 경우, 차량 뒤의 레이더 그림자는 50m(164ft)입니다. 그러나 레이더-영상 융합 카메라가 12m(39ft) 높이에 마운트된 경우, 동일한 차량 뒤의 그림자는 23m(74ft)만 됩니다.
측면 마운트
도로를 따라 이동하는 차량을 모니터링하기 위해 도로 측면(예: 기둥)에 레이더-영상 융합 카메라를 마운트할 수 있습니다. 이러한 설치 유형에서는 최대 25°의 팬 각도를 권장합니다.
AXIS Q1656-DLE 레이더로 고속을 정확하게 측정하려면 차량의 10 m(32ft) 측면 거리 내에 레이더-영상 융합 카메라를 배치합니다. 감지 범위 및 속도 정확도에 대한 자세한 내용은 도로 감지 범위 항목을 참조하십시오.
중앙 마운트
다중 차선 도로에서 차량을 모니터링하려면 도로 위의 갠트리에 하나 이상의 레이더-영상 융합 카메라를 마운트할 수 있습니다.
레이더-영상 융합 카메라를 향해 주행하는 대신 레이더에서 멀어지는 차량을 모니터링하려는 경우에도 동일한 유형의 설치가 가능합니다.
또한 신호등이 있는 횡단보도가 내려다보이는 갠트리에 레이더-영상 융합 카메라를 배치하여 출발 차량의 속도를 기록하거나 속도 위반을 감지할 수도 있습니다.
AXIS Q1656-DLE 레이더로 고속을 정확하게 측정하려면 차량의 10 m(32ft) 측면 거리 내에 레이더-영상 융합 카메라를 배치합니다. 감지 범위 및 속도 정확도에 대한 자세한 내용은 도로 감지 범위 항목을 참조하십시오.
도로 모니터링 사용 사례
Wrong-way detection on a highway ramp(고속도로 진입로에서 잘못된 방향 감지)
고속도로 진입로에서 잘못된 방향으로 주행하는 차량을 감지하고 식별하기 위해 교통 관제는 경사로를 향한 기둥에 AXIS Q1656-DLE를 마운트합니다. 안정적인 감지를 위해 장치 웹 인터페이스의 레이더 페이지에 선 넘기 시나리오를 설정하고 두 개의 라인을 교차해야 하도록 구성하여 차량이 알람을 트리거하도록 합니다. 레이더 시나리오에서는 그림과 같이 경사로에 두 개의 라인을 배치하고 트리거할 주행 방향과 속도를 지정합니다. 이 구성을 사용하면 레이더가 알람을 트리거하고 카메라가 경사로에 있는 차량을 시각적으로 식별할 수 있습니다. 레이더 설정 방법에 대한 자세한 내용은 시나리오 추가 항목을 참고하십시오.
Monitor traffic flow at an intersection - queue build-up(교차로 교통 흐름 모니터링 - 큐 축적)
혼잡한 교차로에 큐가 어떻게, 언제 축적되는지 모니터링하기 위해 교통 통제소는 교차로 위의 갠트리에 AXIS Q1656-DLE를 설치합니다. 특정 지역에서 이동하는 차량에 대해 트리거되는 AXIS Object Analytics의 시나리오에 객체를 설정합니다. 교차로까지 이어지는 도로 부분만 포함하도록 시나리오를 구성하고 장면에 적합한 디텍션 감도를 선택합니다. 큐가 축적되기 시작할 때 알람을 트리거하기 위해 5km/h(3mph) 미만의 속도로 이동하는 차량에서 발생하도록 시나리오를 구성합니다. AXIS Object Analytics 시나리오를 구성하고 적합한 디텍션 감도를 선택하는 방법에 대한 자세한 내용은 AXIS Object Analytics 구성 항목을 참고하십시오.
Monitor traffic flow at an intersection - direction(교차로 교통 흐름 모니터링 - 방향)
혼잡한 교차로에서 교통 흐름과 차량 이동 방향에 대한 오버뷰를 얻기 위해 교통 통제팀은 교차로로 이어지는 도로 위의 갠트리에 AXIS Q1656-DLE를 설치합니다. 차량이 알람을 트리거하기 위해 두 개의 라인을 횡단해야 하는 장치 웹 인터페이스의 레이더 페이지에서 선 넘기 시나리오를 설정합니다. 레이더 시나리오를 구성할 때 교차로로 이어지는 차선 위에 두 개의 선 중 첫 번째 선을 횡단보도 뒤에 배치하여 차량이 선에 정차하는 것을 방지합니다. 그들은 오른쪽으로 이어지는 차선 위에 두 번째 선을 배치합니다. 알람이 울리려면 차량이 지정된 방향으로 두 라인을 모두 통과해야 합니다. 가로지르기당 두 대 이상의 차량에 대한 트리거링을 방지하기 위해 레이더 시나리오의 최소 트리거 지속 시간을 2초에서 0초로 낮춥니다.
모든 방향의 교통 흐름을 모니터링하기 위해 각 방향에 대해 하나의 레이더 시나리오를 생성합니다. 레이더 설정 방법에 대한 자세한 내용은 시나리오 추가 항목을 참고하십시오.
비고
레이더 시나리오에서는 선을 넘는 차량 수를 계산하지 않습니다. 대신 장치 웹 인터페이스의 이벤트 시스템을 사용하여 수를 유지할 수 있습니다. 차량 수를 계산하는 한 가지 방법은 레이더 시나리오가 트리거될 때마다 MQTT 메시지를 보내고 MQTT 수신자 측에서 트리거 수를 계산하는 것입니다.
시작하기
네트워크에서 장치 찾기
네트워크에서 Axis 장치를 찾고 Windows®에서 해당 장치에 IP 주소를 할당하려면 AXIS IP Utility 또는 AXIS Device Manager를 사용합니다. 두 애플리케이션은 axis.com/support에서 무료로 다운로드할 수 있습니다.
이 섹션에는 장치 구성에 대한 지침이 포함되어 있습니다. 특정 기능의 작동 방식에 대해 자세히 알아보려면 상세 정보로 이동하십시오.
노출 모드 선택
특정 감시 장면에 대한 이미지 품질을 향상시키려면 노출 모드를 사용하십시오. 노출 모드를 사용하면 조리개, 셔터 속도 및 게인을 제어할 수 있습니다. Video > Image > Exposure(비디오 > 이미지 > 노출)로 이동하여 다음 노출 모드 중에서 선택합니다.
대부분의 경우에 Automatic exposure(자동 노출)를 선택합니다.
형광등 조명과 같이 특정 인공 조명이 있는 환경에서는 Flicker-free(깜박임 제거)를 선택합니다.
전력선 주파수와 동일한 주파수를 선택합니다.
특정 인공 조명 및 밝은 조명이 있는 환경(예: 밤에 형광등 조명이 있는 야외, 낮에 태양광이 있는 야외)에서는 Flicker-reduced(깜박임 감소)를 선택하십시오.
전력선 주파수와 동일한 주파수를 선택합니다.
현재 노출 설정을 잠그려면 Hold current(현재 설정 유지)를 선택합니다.
IR 조명 최적화
설치 환경과 카메라 주변 조건(예: 장면의 외부 광원)에 따라 LED 강도를 수동으로 조정하면 이미지 품질을 향상시킬 수 있습니다. LED 반사에 문제가 있는 경우 강도를 줄일 수 있습니다.
Video > Image > Day-night mode(비디오 > 이미지 > 주야간 모드)로 이동합니다.
Allow illumination(조명 허용)을 켭니다.
실시간 보기에서 을 클릭하고 Manual(수동)을 선택합니다.
강도를 조정합니다.
야간 모드를 사용하여 저조도 조건에서 적외선의 이점
카메라는 주간에 가시광선을 사용하여 컬러 이미지를 제공합니다. 그러나 가시광선이 감소하면서 컬러 이미지는 덜 밝고 선명해집니다. 이 때 야간 모드로 전환하면 카메라는 가시광선과 근적외선을 모두 사용하여 대신 밝고 상세한 흑백 이미지를 제공합니다. 카메라가 자동으로 야간 모드로 전환되도록 설정할 수 있습니다.
Video > Image > Day and night(비디오 > 이미지 > 주야간)로 이동하고 IR cut filter(적외선 차단 필터)가 Auto(자동)로 설정되었는지 확인합니다.
카메라가 야간 모드일 때 내장 적외선을 사용하려면 Allow illumination(조명 허용) 및 Synchronize illumination(조명 동기화)을 켭니다.
저조도 조건에서 노이즈를 감소
저조도 조건에서 노이즈를 감소시키려면 다음 설정 중 하나 이상을 조정하십시오.
노이즈와 모션 블러 간의 균형을 조정합니다. Video > Image > Exposure(비디오 > 이미지 > 노출)로 이동하고 Blur-noise trade-off(블러-노이즈 균형) 슬라이더를 Low noise(낮은 노이즈)쪽으로 이동합니다.
노출 모드를 자동으로 설정합니다.
비고
최대 셔터 값이 높으면 모션 블러가 발생할 수 있습니다.
셔터 속도를 늦추려면 최대 셔터를 가능한 최대 값으로 설정합니다.
비고
최대 게인을 줄이면 이미지가 어두워질 수 있습니다.
최대 게인을 더 낮은 값으로 설정합니다.
Aperture(조리개) 슬라이더가 있는 경우 Open(열기) 쪽으로 이동합니다.
Video > Image > Appearance(비디오 > 이미지 > 모양)에서 이미지의 선명도를 줄입니다.
저조도 조건에서 모션 블러 줄이기
저조도 조건에서 모션 블러를 줄이려면 Video > Image > Exposure(비디오 > 이미지 > 노출)에서 다음 설정 중 하나 이상을 조정합니다.
비고
게인을 증가하면 이미지 노이즈도 증가합니다.
Max shutter(최대 셔터)를 더 짧은 시간으로 설정하고 Max gain(최대 게인)을 더 높은 값으로 설정합니다.
모션 블러에 문제가 지속되는 경우:
장면의 조도를 높입니다.
객체가 옆쪽이 아니라 카메라 방향으로 또는 반대 방향으로 이동하도록 카메라를 장착합니다.
이미지의 디테일 최대화
중요 사항
이미지의 디테일을 최대화하면 비트레이트이 증가하고 프레임 레이트가 감소될 수 있습니다.
해상도가 가장 높은 캡처 모드를 선택합니다.
Video > Stream > General(비디오 > 스트림 > 일반)로 이동하고 압축을 가능한 한 낮게 설정합니다.
실시간 보기 이미지에서 을 클릭하고 Video format(비디오 형식)에서 MJPEG를 선택합니다.
다이내믹 레인지는 이미지의 조도 차이입니다. 일부 경우에는 가장 어두운 영역과 가장 밝은 영역 간의 차이가 상당할 수 있습니다. 그 결과 이미지에 어두운 영역이나 밝은 영역이 표시되는 경우가 많습니다. 광역 역광 보정(WDR)을 사용하면 이미지의 어두운 영역과 밝은 영역이 모두 표시됩니다.
WDR 기능이 적용되지 않은 이미지WDR 기능이 적용된 이미지
비고
WDR은 이미지에 왜곡을 유발할 수 있습니다.
모든 캡처 모드에서는 WDR을 사용할 수 없습니다.
Video > Image > Wide dynamic range(비디오 > 이미지> 광역 역광 보정(WDR))로 이동합니다.
WDR을 켭니다.
Local contrast(로컬 대비) 슬라이더를 사용하여 WDR의 양을 조정합니다.
문제가 지속되면 Exposure(노출)로 이동하고 Exposure zone(노출 영역)을 조정하여 관심 영역을 포함합니다.
모니터링 중인 장면에서 누군가 움직이도록 요청하고 카메라의 실시간 보기에서 바운딩 박스가 움직이는 객체의 위, 아래, 옆이 아닌 주위에 투영되는지 확인합니다.
필요한 경우 장착 높이를 다시 측정하고 설정을 조정한 후 다시 확인합니다.
유효성 검사가 완료되면 증강 오버레이를 끕니다.
비고
장면에 고도의 변화가 있는 경우 자동 보정 기능을 사용하여 레이더 감지를 기반으로 바운딩 박스의 정확도를 향상시킵니다. 자세한 내용은 장치 자동 보정를 참조하십시오.
참조 지도로 보정
감지된 객체의 이동 경로를 더 쉽게 확인하려면 참조용 지도를 업로드할 수 있습니다. 레이더가 커버하는 영역을 보여주는 평면도나 항공사진을 사용할 수 있습니다. 레이더 보기가 지도의 위치, 방향 및 축척에 맞도록 지도를 보정합니다. 장면의 특정 부분이 관심 대상이면 지도에서 줌인합니다.
지도 보정을 단계별로 안내하는 설정 도우미를 사용하거나 각 설정을 개별적으로 편집할 수 있습니다.
설정 도우미 사용:
Radar > Map calibration(레이더 > 지도 보정)으로 이동합니다.
Setup assistant(설정 도우미)를 클릭하고 지침을 따릅니다.
업로드한 지도와 추가한 설정을 제거하려면 Reset calibration(보정 재설정)을 클릭합니다.
현재 팬 및 줌 설정으로 지도 이미지를 재사용하려면 Download map(지도 다운로드)을 클릭합니다.
Rotate map(지도 회전)에서 슬라이더를 사용하여 지도를 원하는 위치로 회전합니다.
Scale and distance on a map(지도의 축척 및 거리)으로 이동하여 지도에서 미리 지정한 두 지점을 클릭합니다.
Distance(거리)에서 지도에 추가한 두 지점 사이의 실제 거리를 추가합니다.
Pan and zoom map(지도 이동 및 확대/축소)으로 이동하여 버튼을 사용하여 지도 이미지를 이동하거나 지도 이미지를 확대 및 축소합니다.
비고
줌 기능을 사용해도 레이더의 커버리지 범위는 변경되지 않습니다. 확대/축소 후 커버리지의 일부가 시야에서 벗어난 경우에도, 레이더는 전체 커버리지 영역에서 움직이는 객체를 감지합니다. 감지된 움직임을 제외하는 유일한 방법은 제외 영역을 추가하는 것입니다. 자세한 내용은 제외 영역 추가를 참조하십시오.
Radar position(레이더 위치)으로 이동하여 버튼을 사용하여 지도에서 레이더의 위치를 이동하거나 회전합니다.
업로드한 지도와 추가한 설정을 제거하려면 Reset calibration(보정 재설정)을 클릭합니다.
이 비디오는 Axis 레이더 또는 레이더-비디오 융합 카메라에서 기준 지도를 보정하는 방법의 예를 보여줍니다.
감지 영역 설정
모션을 감지할 위치를 결정하기 위해 하나 이상의 감지 영역을 추가할 수 있습니다. 다른 영역을 사용하여 다른 액션을 트리거합니다.
두 가지 유형의 영역이 있습니다.
scenario(시나리오)(이전에는 포함 영역이라고 함)는 움직이는 객체가 룰을 트리거하는 영역입니다. 기본 시나리오는 레이더가 커버하는 전체 영역과 일치합니다.
exclude zone(제외 영역)은 움직이는 객체가 무시되는 영역입니다. 시나리오 내에 원하지 않는 알람을 많이 트리거하는 영역이 있는 경우 제외 영역을 사용합니다.
시나리오 추가
시나리오는 이벤트 시스템에서 룰을 생성하는 데 사용할 수 있는 트리거 조건과 디텍션 설정의 조합입니다. 장면의 다른 부분에 대해 다른 룰을 생성하려면 시나리오를 추가하십시오.
시나리오 추가:
Radar > Scenarios(레이더 > 시나리오)로 이동합니다.
Add scenario(시나리오 추가)를 클릭합니다.
시나리오 이름을 입력하십시오.
영역에서 움직이거나 하나 이상의 라인을 가로지르는 객체에 대해 트리거하려면 선택합니다.
영역에서 움직이는 객체에 대한 트리거:
Movement in area(영역 내 이동)를 선택합니다.
Next (다음)를 클릭합니다.
시나리오에 포함되어야 하는 영역 유형을 선택합니다.
마우스를 사용하여 레이더 이미지나 참조 지도의 원하는 부분을 포함할 수 있도록 영역을 이동하고, 모양을 변경합니다.
Next (다음)를 클릭합니다.
감지 설정을 추가합니다.
Ignore short-lived objects(빠른 객체 무시) 아래에서 트리거까지 걸리는 초를 추가합니다.
Trigger on object type(객체 유형에 대한 트리거) 아래에서 트리거할 객체 유형을 선택합니다.
Speed limit(속도 제한) 아래에서 속도 제한 범위를 추가합니다.
Next (다음)를 클릭합니다.
Minimum trigger duration(최소 트리거 기간) 아래에서 알람의 최소 지속 시간을 설정합니다.
Save(저장)를 클릭합니다.
라인을 가로지르는 객체에서 트리거:
Line crossing(라인 횡단)을 선택합니다.
Next (다음)를 클릭합니다.
장면에 라인을 배치합니다.
마우스를 사용하여 라인을 이동하고 모양을 조정합니다.
감지 방향을 변경하려면 Change direction(방향 전환)을 켭니다.
Next (다음)를 클릭합니다.
감지 설정을 추가합니다.
Ignore short-lived objects(빠른 객체 무시) 아래에서 트리거까지 걸리는 초를 추가합니다.
Trigger on object type(객체 유형에 대한 트리거) 아래에서 트리거할 객체 유형을 선택합니다.
Speed limit(속도 제한) 아래에서 속도 제한 범위를 추가합니다.
Next (다음)를 클릭합니다.
Minimum trigger duration(최소 트리거 기간) 아래에서 알람의 최소 지속 시간을 설정합니다.
기본값은 2초로 설정되어 있습니다. 객체가 라인을 넘을 때마다 시나리오가 트리거되도록 하려면 지속 시간을 0초로 낮춥니다.
Save(저장)를 클릭합니다.
두 개의 라인을 넘는 객체에서 트리거:
Line crossing(라인 횡단)을 선택합니다.
Next (다음)를 클릭합니다.
알람이 트리거될 때 객체가 두 라인을 넘도록 하려면 Require crossing of two lines(두 라인을 횡단해야 함)를 켭니다.
장면에 라인을 배치합니다.
마우스를 사용하여 라인을 이동하고 모양을 조정합니다.
감지 방향을 변경하려면 Change direction(방향 전환)을 켭니다.
Next (다음)를 클릭합니다.
감지 설정을 추가합니다.
Max time between crossings(교차로 간 최대 시간) 아래에서 첫 번째 라인과 두 번째 라인 사이의 시간 제한을 설정합니다.
Trigger on object type(객체 유형에 대한 트리거) 아래에서 트리거할 객체 유형을 선택합니다.
Speed limit(속도 제한) 아래에서 속도 제한 범위를 추가합니다.
Next (다음)를 클릭합니다.
Minimum trigger duration(최소 트리거 기간) 아래에서 알람의 최소 지속 시간을 설정합니다.
기본값은 2초로 설정되어 있습니다. 객체가 두 개의 라인을 넘을 때마다 시나리오가 트리거되도록 하려면 지속 시간을 0초로 낮춥니다.
Save(저장)를 클릭합니다.
제외 영역 추가
제외 영역은 움직이는 객체가 무시되는 영역입니다. 예를 들어, 길가에 흔들리는 나뭇잎을 무시하려면 제외 영역을 추가합니다. 금속 울타리와 같은 레이더 반사가 일어나는 소재로 인해 발생하는 고스트 트랙을 무시하기 위해 제외 영역을 추가할 수도 있습니다.
제외 영역 추가:
Radar > Exclude zones(레이더 > 제외 영역)로 이동합니다.
Add exclude zone(제외 영역 추가)을 클릭합니다.
마우스를 사용하여 레이더 보기나 참조 지도의 원하는 부분을 포함할 수 있도록 영역을 이동하고 모양을 변경합니다.
장치 자동 보정
레이더-영상 융합 카메라의 자동 보정은 AXIS Object Analytics에서 감지된 객체 주위에 나타나는 바운딩 박스의 정확도를 향상시킵니다. 자동 보정을 통해 장치는 높이 및 각도 정확도와 같은 비디오의 정보를 사용하여 레이더 감지를 기반으로 바운딩 박스의 위치 지정을 개선합니다.
레이더의 틸트 각도를 표시하는 오버레이를 레이더의 실시간 보기에 추가할 수 있습니다. 이 기능은 설치 중이거나 장치의 틸트 각도를 알아야 할 때마다 유용합니다.
비고
장치가 수평인 경우 틸트 각도 오버레이에 “90“이 표시됩니다. 오버레이에 “75“가 표시되면 레이더의 틸트 각도가 수평선보다 15° 아래에 있습니다.
Radar > Overlays(레이더 > 오버레이)로 이동합니다.
Text(텍스트)를 선택하고 을 클릭합니다.
#op를 입력합니다.
또한 Modifier(수정자)를 클릭하고 목록에서 #op를 선택합니다.
위치를 선택합니다. 실시간 보기에서 오버레이 필드를 드래그하여 위치를 변경할 수도 있습니다.
AXIS Object Analytics 구성
AXIS Object Analytics는 움직이는 객체를 감지 및 분류하는 AI 기반 애플리케이션입니다. 이는 AXIS Q1656-DLE에서 레이더-비디오 융합을 구성하기 위한 메인 인터페이스이기도 합니다. 융합의 실시간 출력은 애플리케이션에서 구성된 시나리오 내의 비디오 스트림에서만 확인할 수 있습니다.
시나리오 생성
AXIS Object Analytics의 시나리오로 레이더-영상 융합 카메라의 감지 설정 및 트리거 조건을 정의합니다.
장치의 웹 인터페이스에서 Apps > AXIS Object Analytics(앱 > AXIS Object Analytics)로 이동합니다.
애플리케이션을 시작하고 Open(열기)을 클릭합니다.
시작 화면에서 Step-by-step(단계별)을 클릭하여 권장 설정 절차를 따릅니다.
Considerations(고려 사항)에서 전체 정보를 읽어보고 Finish(마침)를 클릭합니다.
+ New scenario(+ 새로운 시나리오)를 클릭합니다.
비고
기본적으로, Object in area(영역 내 객체) 시나리오와 Line crossing(선 넘기) 시나리오는 비디오와 레이더 입력을 모두 사용합니다. AXIS Object Analytics의 다른 시나리오는 영상 입력만 사용합니다.
요건에 따라 시나리오를 선택합니다.
애플리케이션이 탐지할 객체 유형을 선택합니다.
시나리오를 구성하십시오.
설정을 확인하고 Finish(마침)를 클릭합니다.
비고
움직이는 객체 주위에 바운딩 박스를 표시하려면 Settings(설정)로 이동하여 Metadata overlay(메타데이터 오버레이)를 활성화합니다. 두 개의 시나리오를 생성할 때, 하나는 비디오 및 레이더 입력을 모두 사용하고 다른 하나는 비디오 입력만 사용하는 경우, 움직이는 객체 주위에 이중 바운딩 박스가 표시됩니다. 이 동작은 예상되는 동작입니다.
이제 AXIS Object Analytics에서 시나리오를 생성했습니다. 시나리오를 수정하고 추가 설정을 적용하려면 Open(열기)을 클릭합니다. 레이더와 영상 입력을 모두 사용하는 시나리오에서는 속도를 사용하여 감지 감도를 트리거 및 선택할 수 있습니다. 자세한 지침은 다음을 참조하십시오.
허위 경보가 너무 많이 온다고 생각되면 특정한 유형의 움직임이나 물체를 필터링하거나, 커버리지를 변경하거나, 디텍션 감도를 조정할 수 있습니다. 어느 설정이 환경에 가장 적합한지 확인합니다.
AXIS Object Analytics의 감지 감도를 조정합니다.
Apps > AXIS Object Analytics(앱 > AXIS Object Analytics)로 이동하고, 시나리오를 열고, 더 낮은 Detection sensitivity(디텍션 감도)를 선택합니다.
Low sensitivity(낮은 감도): 객체를 감지하려면 레이더 및 카메라가 모두 필요합니다. 허위 알람의 위험은 감소하지만 감지 누락 위험은 증가합니다.
Automatic(자동): 객체를 감지하는 데 레이더와 카메라가 모두 필요한지 또는 둘 중 하나만 필요한지는 애플리케이션으로 결정할 수 있습니다.
High sensitivity(높은 감도): 객체를 감지하려면 레이더나 카메라가 있어야 합니다. 허위 알람의 위험은 증가하지만, 감지 누락 위험은 감소합니다.
레이더의 감지 감도를 조정합니다.
Radar > Settings > Detection(레이더 > 설정 > 디텍션)으로 이동한 후 더 낮은 Detection sensitivity(디텍션 감도)를 선택합니다. 이렇게 하면 허위 알람이 발생할 위험은 줄어들지만, 레이더에서 일부 움직임도 누락될 수 있습니다.
낮음: 이 감도는 영역에 금속 객체나 대형 차량이 많이 있을 때 사용합니다. 레이더는 물체를 추적하고 분류하는 데 시간이 더 오래 걸립니다. 이는 특히 빠르게 움직이는 물체의 경우 감지 범위를 줄일 수 있습니다.
중간: 이것이 기본 설정입니다.
높음: 이 감도는 레이더 앞에 금속 물체가 없는 노지가 있을 때 사용합니다. 이는 사람에 대한 감지 범위를 늘립니다.
시나리오 수정 및 영역 제외:
시나리오에 금속 벽과 같은 단단한 표면이 포함된 경우 단일 물리적 객체에 대해 여러 번 감지하는 반사가 있을 수 있습니다. 시나리오 모양을 수정하거나 시나리오의 특정 부분을 무시하는 제외 영역을 추가할 수 있습니다. 자세한 내용은 시나리오 추가 및 제외 영역 추가 항목을 참조하십시오.
하나가 아닌 두 개의 선을 교차하는 객체에 대해 트리거합니다.
라인 횡단 시나리오에 흔들리는 객체나 움직이는 동물이 포함된 경우, 객체가 선을 넘어 허위 알람을 트리거할 위험이 있습니다. 이 경우 객체가 두 선을 넘었을 때만 트리거되도록 시나리오를 구성할 수 있습니다. 자세한 내용은 시나리오 추가를 참조하십시오.
움직임에 대한 필터:
Radar > Settings > Detection(레이더 > 설정 > 감지)으로 이동하고 Ignore swaying objects(흔들리는 객체 무시)를 선택합니다. 이 설정은 감시 영역의 나무, 덤불 및 깃대로 인해 유발되는 허위 알람을 최소화합니다.
Radar > Settings > Detection(레이더 > 설정 > 감지)으로 이동하고 Ignore small objects(작은 객체 무시)를 선택합니다. 이 설정은 고양이나 토끼와 같이 적용 범위 내 작은 객체로 인한 허위 알람을 최소화합니다.
시간에 대한 필터:
Radar > Scenarios(레이더 > 시나리오)로 이동합니다.
시나리오를 선택하고 을 클릭하여 설정을 수정합니다.
Seconds until trigger(트리거까지 걸리는 초)에서 더 높은 값을 선택합니다. 이는 레이더가 객체를 추적하기 시작해서 알람을 트리거할 때까지의 지연 시간입니다. 시나리오에서 타이머는 객체가 특정 영역에 들어왔을 때 시작되는 것이 아니라 레이더가 처음 객체를 감지했을 때 시작됩니다.
객체 유형에 대한 필터:
Radar > Scenarios(레이더 > 시나리오)로 이동합니다.
시나리오를 선택하고 을 클릭하여 설정을 수정합니다.
특정 객체 유형에 대한 트리거를 방지하려면 시나리오에서 이벤트를 트리거하지 않아야 하는 객체 유형을 선택 취소합니다.
비고
객체 유형 설정은 레이더에만 영향을 미칩니다. 이는 AXIS Object Analytics에서 무시됩니다.
카메라와 Windows 컴퓨터의 시간을 동기화하려면 NTP 서버를 사용하십시오. 시계가 동기화되지 않으면 추적이나 고스트 추적이 지연될 수도 있습니다.
내장된 레이더 오토트래킹 서비스로 PTZ 카메라 제어
내장된 레이더 오토트래킹 기능은 레이더가 PTZ 카메라를 직접 제어하는 에지 투 에지 솔루션을 생성합니다. 모든 Axis PTZ 카메라를 지원합니다.
비고
내장된 레이더 오토트래킹 서비스를 사용하여 하나의 레이더와 하나의 PTZ 카메라를 연결할 수 있습니다. 둘 이상의 레이더 또는 PTZ 카메라를 사용하려는 설정의 경우 AXIS Radar Autotracking for PTZ를 사용하십시오. 자세한 내용은 AXIS Radar Autotracking for PTZ로 PTZ 카메라 제어을 참조하십시오.
이 지침에서는 PTZ 카메라와 레이더를 페어링하는 방법, 장치를 교정하는 방법, 객체 추적을 설정하는 방법에 대해 설명합니다.
시작하기 전:
관심 영역을 정의하고 레이더에서 제외 영역을 설정하여 불필요한 알람을 방지하십시오. PTZ 카메라가 관련 없는 객체를 추적하지 않도록 하기 위해, 레이더 반사 재료나 흔들리는 객체(예: 나뭇잎)와 같은 영역을 제외하도록 설정하십시오. 자세한 내용은 제외 영역 추가 항목을 참조하십시오.
레이더를 PTZ 카메라와 페어링합니다.
System > Edge-to-edge > PTZ pairing(시스템 > 엣지 투 엣지 > PTZ 페어링)으로 이동합니다.
PTZ 카메라의 IP 주소, 사용자 이름 및 패스워드를 입력합니다.
Connect(연결)를 클릭합니다.
Configure Radar autotracking(레이더 오토트래킹 구성)을 클릭하거나 Radar > Radar PTZ autotracking(레이더 > 레이더 PTZ 오토트래킹)으로 이동하여 레이더 오토트래킹을 설정합니다.
레이더와 PTZ 카메라를 보정합니다.
Radar > Radar PTZ autotracking(레이더 > 레이더 PTZ 오토트래킹)으로 이동합니다.
카메라 장착 높이를 설정하려면 Camera mounting height(카메라 장착 높이)로 이동합니다.
레이더와 동일한 방향을 가리키도록 PTZ 카메라를 팬하려면 Pan alignment(팬 정렬)로 이동합니다.
경사진 지면을 보정하기 위해 틸트를 조정해야 하는 경우 Ground incline offset(지면 경사 오프셋)으로 이동하여 각도 단위로 오프셋을 추가합니다.
PTZ 추적 설정:
사람, 차량 및/또는 알 수 없는 물체를 추적하려면 Track(추적)을 선택합니다.
PTZ 카메라로 객체 추적을 시작하려면 Tracking(추적)을 켭니다.
추적은 객체 또는 객체 그룹을 카메라의 보기에 유지하도록 자동으로 확대합니다.
카메라 보기에 맞지 않는 여러 객체가 예상되는 경우 Object switching(객체 전환)을 켭니다.
이 설정을 사용하면 레이더는 추적할 객체에 우선 순위를 부여합니다.
각 객체를 몇 초 동안 추적할지 결정하려면 Object hold time(객체 유지 시간)을 설정합니다.
레이더가 더 이상 객체를 추적하지 않는 경우 PTZ 카메라를 홈 포지션으로 되돌리기 위해 Return to home(홈으로 돌아가기)을 켭니다.
PTZ 카메라가 홈으로 돌아가기 전에 마지막으로 알려진 추적된 객체 위치에 얼마나 오랫동안 머물러야 하는지 결정하려면 Return to home timeout(홈으로 돌아가기 시간 초과)를 설정합니다.
PTZ 카메라의 확대/축소를 미세 조정하려면 슬라이더에서 확대/축소를 조정합니다.
AXIS Radar Autotracking for PTZ로 PTZ 카메라 제어
AXIS Radar Autotracking for PTZ는 객체를 추적할 때 다양한 설정을 처리할 수 있는 서버 기반 솔루션입니다.
하나의 레이더로 여러 PTZ 카메라를 제어합니다.
여러 레이더로 하나의 PTZ 카메라를 제어합니다.
여러 레이더로 여러 PTZ 카메라를 제어합니다.
동일한 영역을 커버하는 다른 위치에 장착된 경우 하나의 레이더로 하나의 PTZ 카메라를 제어합니다.
설치한 AXIS Speed Monitor 장치의 웹 인터페이스에서 MQTT 클라이언트를 설정하십시오.
System > MQTT > MQTT client > Broker(시스템 > MQTT > MQTT 클라이언트 > 브로커)로 이동하고 다음 정보를 입력합니다.
호스트: 브로커 IP 주소
Client ID(클라이언트 ID): 장치의 ID
Protocol(프로토콜): 브로커가 설정된 프로토콜
포트: 브로커가 사용하는 포트 번호
브로커 Username(사용자 이름)과 Password(패스워드)
Save(저장) 및 Connect(연결)을 클릭합니다.
레이더 데이터를 MQTT 브로커에 페이로드로 게시하는 조건을 생성하십시오.
System > MQTT > MQTT publication(시스템 > MQTT > MQTT 게시)으로 이동하고 + Add condition(+ 조건 추가)를 클릭합니다.
조건 목록의 Application(애플리케이션)에서 Speed Monitor: Track exited zone(속도 모니터: 트랙 이탈 영역)을 선택합니다.
이제 장치는 시나리오에서 나가는 모든 움직이는 객체에 대한 레이더 추적에 대한 정보를 보낼 수 있습니다. 모든 객체에는 자체 레이더 트랙 매개변수(예: rmd_zone_name, tracking_id, trigger_count)가 있습니다. 전체 매개변수 목록은 AXIS Speed Monitor 사용 설명서에서 확인할 수 있습니다.
카메라가 객체를 감지하면 비디오 녹화
이 예에서는 카메라가 객체를 감지했을 때 SD 카드에 녹화를 시작하도록 카메라를 설정하는 방법을 설명합니다. 해당 녹화에는 감지 전 5초와 감지 종료 후의 1분이 포함됩니다.
네트워크에서 직접 장치를 찾으려면 Discover devices(장치 검색)를 클릭합니다.
비고
이 목록에는 페어링 가능한 장치뿐만 아니라 검색된 모든 Axis 장치가 표시됩니다.
이미 페어링된 장치의 경우 정보 아이콘이 표시됩니다. 이미 활성화된 페어링에 대한 정보를 얻으려면 아이콘 위로 마우스를 가져갑니다.
페어링된 장치들이 동일한 AXIS OS 버전을 실행 중인지 확인하십시오.
중요 사항
Bonjour가 활성화된 장치만 검색할 수 있습니다. 장치에 대해 Bonjour를 활성화하려면 웹 인터페이스를 열고 System(시스템) > Network(네트워크) > Network discovery protocols(네트워크 검색 프로토콜)로 이동합니다.
웹 인터페이스
AXIS OS가 탑재된 장치의 웹 인터페이스에서 사용할 수 있는 모든 기능과 설정에 대해 알아보려면 AXIS OS 웹 인터페이스 도움말로 이동합니다.
상세 정보
장거리 연결
이 제품은 미디어 컨버터를 통한 광섬유 케이블 설치를 지원합니다. 광섬유 케이블 설치는 다음과 같은 여러 가지 이점을 제공합니다.
장거리 연결
고속
긴 수명
대용량 데이터 전송
전자기 간섭 내성
axis.com/learning/white-papers의 “Long distance surveillance - Fiber-optic communication in network video(장거리 감시 - 네트워크 비디오의 광섬유 통신)“ 백서에서 광섬유 케이블 설치에 대해 자세히 알아보십시오.
미디어 컨버터 설치 방법에 대한 정보는 이 제품의 설치 가이드를 참조하십시오.
캡처 모드
캡처 모드는 카메라가 이미지를 캡처하는 방법을 정의하는 프리셋 구성입니다.
캡처 모드 설정은 장치에서 사용할 수 있는 최대 해상도 및 최대 프레임 레이트를 정의합니다.
최대 해상도보다 낮은 해상도의 캡처 모드는 화각을 줄일 수 있습니다.
캡처 모드는 셔터 속도에도 영향을 미치며, 이는 다시 감광도에 영향을 미칩니다. 이는 최대 프레임 레이트가 높은 캡처 모드는 감광도가 낮고, 반대로 감광도가 높은 캡처 모드는 최대 프레임 속도가 낮기 때문입니다.
일부 캡처 모드에서는 WDR을 사용할 수 없습니다.
저해상도 캡처 모드는 원본 해상도에서 샘플링되거나 원본에서 잘릴 수 있으며, 이 경우 화각도 영향을 받을 수 있습니다.
이미지는 화각과 종횡비가 두 가지 다른 캡처 모드 간에 어떻게 변경될 수 있는지 보여줍니다.
어떤 캡처 모드를 선택할 것인지는 특정 감시 설정에 대한 프레임 레이트와 해상도의 요구 사항에 따라 달라집니다. axis.com의 제품 데이터시트에서 사용 가능한 캡처 모드의 사양을 알아보십시오.
원격 포커스 및 줌
원격 포커스 및 줌 기능을 사용하면 컴퓨터에서 카메라의 포커스 및 줌을 조정할 수 있습니다. 이 기능은 카메라의 설치 위치를 방문하지 않고도 장면의 포커스, 시야각 및 해상도를 최적화할 수 있는 편리한 방법입니다.
프라이버시 마스크
특정 영역 감시 차단(프라이버시 마스크)은 모니터링되는 영역의 일부를 포함하는 사용자 지정 영역입니다. 비디오 스트림에서 특정 영역 감시 차단(프라이버시 마스크)은 단색의 블록이나 모자이크 패턴으로 나타납니다.
모든 스냅샷, 녹화된 비디오 및 라이브 스트림에 특정 영역 감시 차단(프라이버시 마스크)이 표시됩니다.
VAPIX® API(애플리케이션 프로그래밍 인터페이스)를 사용하여 특정 영역 감시 차단(프라이버시 마스크)을 숨길 수 있습니다.
중요 사항
여러 특정 영역 감시 차단(프라이버시 마스크)을 사용하는 경우 제품의 성능에 영향을 줄 수 있습니다.
여러 특정 영역 감시 차단(프라이버시 마스크)을 생성할 수 있습니다. 각 마스크는 3~10개의 앵커 포인트를 가질 수 있습니다.
오버레이
오버레이는 비디오 스트림 위에 중첩 표시됩니다. 녹화나 제품을 설치 및 구성하는 동안 타임스탬프와 같은 추가 정보를 제공하는 데 사용됩니다. 텍스트나 이미지를 추가할 수 있습니다.
비디오 스트리밍 표시기는 다른 유형의 오버레이입니다. 라이브 뷰 비디오 스트림이 라이브임을 보여줍니다.
비고
PoE 클래스 3을 통해 연결되는 경우, SIP 통화를 제외한 모든 비디오 스트림에 오버레이가 포함됩니다.
스트리밍 및 저장
비디오 압축 형식
어떤 압축 방법을 사용할지는 보기 요구 사항과 네트워크 속성에 따라 다르게 결정됩니다. 다음과 같은 옵션을 사용할 수 있습니다.
Motion JPEG
비고
Opus 오디오 코덱에 대한 지원을 받기 위해 Motion JPEG 스트림은 항상 RTP를 통해 전송됩니다.
Motion JPEG 또는 MJPEG는 디지털 비디오 시퀀스로 개별 JPEG 이미지의 시리즈로 구성됩니다. 이런 이미지는 업데이트된 모션을 지속적으로 보여주는 스트림을 생성하기에 충분한 레이트로 표시되고 업데이트됩니다. 동영상을 인식하는 뷰어에서 레이트는 초당 최소 16개의 이미지 프레임이어야 합니다. 초당 30(NTSC) 또는 25(PAL) 프레임은 완전한 동영상으로 인식됩니다.
Motion JPEG 스트림은 상당한 양의 대역폭을 사용하지만 탁월한 이미지 품질을 제공하며 스트림에 포함된 모든 이미지에 액세스합니다.
H.264 또는 MPEG-4 Part 10/AVC
비고
H.264는 라이센스가 부여된 기술입니다. Axis 제품에는 1개의 H.264 보기 클라이언트 라이센스가 포함되어 있습니다. 라이센스가 없는 추가 클라이언트 사본을 설치하는 것은 금지되어 있습니다. 추가 라이센스를 구입하려면 Axis 리셀러에게 문의하십시오.
H.264는 이미지 품질 저하 없이 디지털 비디오 파일의 크기를 Motion JPEG 형식에 비해 80% 이상, 이전 MPEG 형식에 비해 50%까지 줄일 수 있습니다. 이는 비디오 파일에 필요한 네트워크 대역폭과 저장 공간을 훨씬 더 줄일 수 있다는 것을 의미합니다. 즉, 주어진 비트레이트에서 높은 수준의 비디오 품질을 제공할 수 있습니다.
H.265 또는 MPEG-H Part 2/HEVC
H.265는 화질 저하 없이 H.264에 비해 디지털 비디오 파일의 크기를 25% 이상 줄일 수 있습니다.
비고
H.265는 라이센스가 부여된 기술입니다. Axis 제품에는 1개의 H.265 보기 클라이언트 라이센스가 포함되어 있습니다. 라이센스가 없는 추가 클라이언트 사본을 설치하는 것은 금지되어 있습니다. 추가 라이센스를 구입하려면 Axis 리셀러에게 문의하십시오.
대부분의 웹 브라우저는 H.265 디코딩을 지원하지 않으며, 이 때문에 카메라는 웹 인터페이스에서 H.265 디코딩을 지원하지 않습니다. 대신 H.265 디코딩을 지원하는 영상 관리 시스템 또는 애플리케이션을 사용할 수 있습니다.
이미지, 스트림 및 스트림 프로파일 설정은 서로 어떤 관련이 있습니까?
Image(이미지)탭에는 제품의 모든 비디오 스트림에 영향을 주는 카메라 설정이 포함되어 있습니다. 이 탭에서 내용을 변경하면 모든 비디오 스트림 및 녹화에 즉시 영향을 줍니다.
Stream(스트림)탭에는 비디오 스트림 설정이 포함되어 있습니다. 제품에서 비디오 스트림을 요청하고 예를 들어 해상도 또는 프레임 레이트를 지정하지 않으면 이러한 설정을 얻을 수 있습니다. Stream(스트림)탭에서 설정을 변경하면 진행 중인 스트림에는 영향을 미치지 않지만 새 스트림을 시작할 때 적용됩니다.
Stream profiles(스트림 프로파일) 설정은 Stream(스트림) 탭의 설정보다 우선합니다. 특정 스트림 프로파일이 있는 스트림을 요청하면 해당 프로파일의 설정이 스트림에 포함됩니다. 스트림 프로파일을 지정하지 않고 스트림을 요청하거나 제품에 존재하지 않는 스트림 프로파일을 요청하는 경우 스트림은 Stream(스트림) 탭의 설정을 포함합니다.
비트레이트 제어
비트레이트 제어가 비디오 스트림의 대역폭 소비를 관리하도록 지원합니다.
가변 비트 레이트(VBR) 가변 비트 레이트를 사용하면 장면의 활동 수준에 따라 대역폭 소모가 달라질 수 있습니다. 움직임이 많을수록 많은 대역폭이 필요합니다. 가변 비트레이트를 사용하면 일정한 이미지 품질이 보장되지만 더 많은 스토리지가 있는지 확인해야 합니다.
최대 비트 레이트(MBR) 최대 비트 레이트는 시스템의 비트 레이트 제한을 처리하기 위해 목표 비트 레이트를 설정하도록 합니다. 순간 비트레이트가 지정된 목표 비트레이트 미만으로 유지되면 이미지 품질이나 프레임 속도가 저하될 수 있습니다. 이미지 품질 또는 프레임 레이트를 우선시하도록 선택할 수 있습니다. 대상 비트레이트를 예상 비트레이트보다 높은 값으로 구성하는 것이 좋습니다. 이것은 장면에 높은 수준의 활동이 있는 경우 여백을 제공합니다.
대상 비트레이트
평균 비트 레이트(ABR) 평균 비트 레이트를 사용하면 더 오랜 기간에 비트 레이트가 자동으로 조정됩니다. 지정된 대상을 충족하고 사용 가능한 스토리지를 기반으로 최상의 비디오 품질을 제공할 수 있습니다. 정적 장면에 비해 활동량이 많은 장면에서 비트레이트가 더 높습니다. 평균 비트레이트 옵션을 사용하면 활동이 많은 장면에서 더 나은 이미지 품질을 얻을 가능성이 더 큽니다. 이미지 품질이 지정된 대상 비트레이트에 맞게 조정될 때 지정된 시간(보존 시간) 동안 비디오 스트림을 저장하는 데 필요한 총 스토리지를 정의할 수 있습니다. 다음 방법 중 하나로 평균 비트레이트 설정을 지정하십시오.
예상 스토리지 요구량을 계산하려면 대상 비트레이트와 보존 시간을 설정하십시오.
사용 가능한 저장 공간과 필요한 보존 시간을 기준으로 평균 비트레이트를 계산하려면 대상 비트레이트 계산기를 사용하십시오.
대상 비트레이트
실제 평균 비트레이트
최대 비트레이트를 설정하고 평균 비트레이트 옵션 내에서 대상 비트레이트를 지정할 수도 있습니다.
대상 비트레이트
실제 평균 비트레이트
에지 투 에지 기술
에지 투 에지는 IP 장치가 서로 직접 통신하도록 하는 기술입니다. 이 기술은 예를 들어, Axis 카메라와 Axis 오디오 또는 레이더 제품들 간의 스마트 페어링 기능을 제공합니다.
에지 투 에지 스피커 페어링을 사용하면 호환 가능 Axis 네트워크 스피커를 카메라의 일부인 것처럼 사용할 수 있습니다. 페어링되면 스피커 기능이 카메라의 웹 인터페이스에 통합되고 네트워크 스피커는 오디오 클립을 재생하고 카메라를 통해 사운드를 전송할 수 있는 오디오 출력 장치 역할을 합니다.
카메라는 VMS에 오디오 출력이 통합된 카메라로 식별되고 재생되는 모든 오디오를 스피커로 리디렉션합니다.
네트워크 페어링
엣지 투 엣지 네트워크 페어링을 사용하면 카메라를 조명 및 사이렌 또는 조명기 기능이 있는 호환 Axis 장치에 연결하고 통합 기능을 활용할 수 있습니다.
분석 및 앱
분석 및 앱을 통해 Axis 장치를 더욱 폭넓게 활용할 수 있습니다. AXIS Camera Application Platform (ACAP)은 타사 개발자가 Axis 장치용 분석 및 기타 앱을 개발할 수 있도록 지원하는 개방형 플랫폼입니다. 앱은 장치에 사전 설치되어 제공되거나, 무료 또는 유료(라이센스 구매)로 다운로드할 수 있습니다.
Axis 분석 및 앱에 대한 사용자 설명서는 help.axis.com에서 확인할 수 있습니다.
비고
여러 앱을 동시에 실행할 수 있지만 일부 앱은 서로 호환되지 않을 수 있습니다. 특정 앱의 조합은 동시에 실행할 때 처리 능력 또는 메모리 리소스가 너무 많이 필요할 수도 있습니다. 배포하기 전에 앱이 서로 원활하게 작동하는지 확인하십시오.
AXIS Object Analytics
AXIS Object Analytics는 카메라에 사전 설치되어 제공되는 분석 애플리케이션입니다. AXIS Object Analytics는 장면에서 움직이는 객체를 감지하고 이 객체를 사람 또는 차량으로 분류합니다. 다양한 유형의 객체에 대한 알람을 보내도록 애플리케이션을 설정할 수 있습니다. 애플리케이션의 작동 방식에 대한 자세한 내용은 AXIS Object Analytics 사용자 설명서를 참조하십시오.
AXIS Image Health Analytics
AXIS Image Health Analytics는 이미지 품질 저하 또는 변조 시도를 감지하는 데 사용할 수 있는 AI 기반 애플리케이션입니다. 이 애플리케이션은 장면의 동작을 분석하고 학습하여 이미지의 흐릿함이나 노출 부족을 감지하거나 시야가 가려지거나 방향이 바뀐 것을 감지합니다. 이러한 감지에 대해 이벤트를 전송하고 카메라의 이벤트 시스템 또는 타사 소프트웨어를 통해 액션을 트리거하도록 애플리케이션을 설정할 수 있습니다.
장면의 움직이는 객체에 분석 메타데이터를 사용할 수 있습니다. 지원되는 객체 등급은 객체 유형 및 분류의 신뢰 수준에 대한 정보와 함께 객체를 감싸는 바운딩 박스를 통해 비디오 스트림에 시각화됩니다. AXIS Scene Metadata 통합 가이드에서 분석 메타데이터의 구성 및 사용 방법을 자세히 알아보십시오.
서명된 OS는 소프트웨어 공급업체가 개인 키로 AXIS OS 이미지에 서명하여 구현됩니다. 서명이 운영 체제에 첨부되면 장치는 소프트웨어를 설치하기 전에 소프트웨어를 확인합니다. 장치에서 소프트웨어 무결성이 손상되었음을 감지하면 AXIS OS 업그레이드가 거부됩니다.
Secure Boot
Secure Boot는 변경 불가능 메모리(부트 ROM)에서 시작하여 암호화로 검증된 소프트웨어의 손상되지 않은 체인으로 구성된 부트 프로세스입니다. 서명된 OS 사용을 기반으로 하는 Secure Boot는 장치가 승인된 소프트웨어로만 부팅할 수 있도록 합니다.
Axis Edge Vault
Axis Edge Vault는 Axis 장치를 보호하는 하드웨어 기반 사이버 보안 플랫폼을 제공합니다. 장치의 ID 및 무결성을 보장하고 무단 액세스로부터 중요한 정보를 보호하는 기능을 제공합니다. 이 플랫폼은 암호화 컴퓨팅 모듈(보안 요소 및 TPM) 및 SoC 보안(TEE 및 Secure Boot)의 강력한 기반 위에 구축되며, 에지 장치 보안에 대한 전문 지식이 결합되어 있습니다.
TPM 모듈
TPM(Trusted Platform Module)은 인증되지 않은 액세스로부터 정보를 보호하기 위해 암호화 기능을 제공하는 구성 요소입니다. 항상 활성화되며 변경할 수 있는 설정이 없습니다.
Axis device ID
장치의 출처를 확인할 수 있는 것은 장치 ID에 대한 신뢰를 구축하는 데 핵심적인 것입니다. 생산 과정에서 Axis Edge Vault가 설치된 장치에는 공장에서 프로비저닝된 고유하고 IEEE 802.1AR을 준수하는 Axis 장치 ID 인증서가 할당됩니다. 이는 장치의 출처를 증명하는 여권과 같은 역할을 합니다. 장치 ID는 Axis 루트 인증서로 서명된 인증서로 보안 키 저장소에 안전하고 영구적으로 저장됩니다. 자동화된 보안 장치 온보딩 및 보안 장치 식별을 위해 고객의 IT 인프라에서 장치 ID를 활용할 수 있습니다.
Signed Video
Signed Video는 비디오 파일의 보관 연속성을 증명하지 않고도 비디오 증거가 변조되지 않은 것으로 검증될 수 있도록 합니다. 각 카메라는 보안 키 저장소에 안전하게 저장된 고유한 비디오 서명 키를 사용하여 비디오 스트림에 서명을 추가합니다. 비디오가 재생될 때 파일 플레이어는 비디오의 손상 여부를 표시합니다. Signed Video를 통해 비디오의 원본 촬영 카메라를 추적하고 비디오가 카메라를 떠난 후 변조되지 않았는지 확인할 수 있습니다.
또한 장치의 웹 인터페이스를 통해 매개변수를 공장 출하 시 기본값으로 재설정할 수 있습니다. Maintenance(유지 보수) >Factory default(공장 출하 시 기본 설정)로 이동하고 Default(기본)를 클릭합니다.
AXIS OS 옵션
Axis는 활성 트랙 또는 LTS(장기 지원) 트랙에 따라 장치 소프트웨어 관리를 제공합니다. 활성 트랙에 있다는 것은 모든 최신 제품 기능에 지속적으로 액세스한다는 의미이며, LTS 트랙은 주로 버그 수정과 보안 업데이트에 중점을 두는 주기적 릴리즈와 함께 고정 플랫폼을 제공합니다.
최신 기능에 액세스하려고 하거나 Axis 엔드 투 엔드 시스템 제품을 사용하는 경우 활성 트랙의 AXIS OS를 사용하는 것이 좋습니다. 최신 활성 트랙에 대해 지속적으로 검증되지 않는 타사 통합을 사용하는 경우 LTS 트랙을 사용하는 것이 좋습니다. LTS를 사용하면 제품이 중요한 기능적 변경 사항을 도입하거나 기존 통합에 영향을 주지 않고 사이버 보안을 유지 관리할 수 있습니다. Axis 장치 소프트웨어 전략에 대한 자세한 내용은 axis.com/support/device-software를 참조하십시오.
현재 AXIS OS 버전 확인
AXIS OS는 당사 장치의 기능을 결정합니다. 문제를 해결할 때는 현재 AXIS OS 버전을 확인하여 시작하는 것이 좋습니다. 최신 버전에 특정 문제를 해결하는 수정 사항이 포함되어 있을 수 있습니다.
현재 AXIS OS 버전을 확인하려면 다음을 수행합니다.
장치의 웹 인터페이스 > Status(상태)로 이동합니다.
Device info(장치 정보)에서 AXIS OS 버전을 확인합니다.
AXIS OS 업그레이드
중요 사항
장치 소프트웨어를 업그레이드하면, 사전 구성된 설정과 사용자 지정 설정이 저장됩니다. Axis Communications AB는 새 AXIS OS 버전에서 해당 기능을 사용할 수 있더라도 설정이 저장된다고 보장할 수 없습니다.
AXIS OS 12.6부터는 장치의 현재 버전과 목표 버전 사이에 있는 모든 LTS 버전을 설치해야 합니다. 예를 들어 현재 설치된 장치 소프트웨어 버전이 AXIS OS 11.2인 경우, 장치를 AXIS OS 12.6으로 업그레이드하기 전에 LTS 버전 AXIS OS 11.11을 설치해야 합니다. 자세한 내용은 AXIS OS Lifecycle 가이드: 업그레이드 경로를 참조하십시오.
업그레이드 프로세스 중에 장치가 전원에 연결되어 있는지 확인합니다.
비고
활성 트랙의 최신 AXIS OS 버전으로 장치를 업그레이드하면 제품이 사용 가능한 최신 기능을 수신합니다. 업그레이드하기 전에 항상 새 릴리스마다 제공되는 릴리즈 정보와 업그레이드 지침을 참조하십시오. 최신 AXIS OS 버전과 릴리즈 정보를 찾으려면 axis.com/support/device-software로 이동합니다.
Maintenance > AXIS OS upgrade(유지보수 > AXIS OS 업그레이드)로 이동하여 Upgrade(업그레이드)를 클릭합니다.
업그레이드가 완료되면 제품이 자동으로 재시작됩니다.
기술적 문제 및 가능한 해결책
AXIS OS 업그레이드 문제
AXIS OS 업그레이드 실패
업그레이드에 실패하면 장치가 이전 버전을 다시 로드합니다. 가장 일반적인 원인은 잘못된 AXIS OS 파일이 업로드된 것입니다. 장치에 해당하는 AXIS OS 파일 이름을 확인하고 다시 시도하십시오.
AXIS OS 업그레이드 후 문제
업그레이드 후 문제가 발생하면 Maintenance(유지보수) 페이지에서 이전에 설치된 버전으로 롤백하십시오.
IP 주소 설정 문제
IP 주소를 설정할 수 없음
장치에 설정하려는 IP 주소와 장치에 액세스하는 데 사용하는 컴퓨터의 IP 주소가 서로 다른 서브넷에 있는 경우, IP 주소를 설정할 수 없습니다. 네트워크 관리자에게 문의하여 IP 주소를 받으십시오.
해당 IP 주소를 다른 장치가 사용하고 있을 수 있습니다. 확인 방법:
네트워크에서 Axis 장치를 분리합니다.
Command/DOS 창에서, ping을 입력한 후 장치의 IP 주소를 입력합니다.
Reply from <IP address>: bytes=32; time=10...이라는 응답을 받는 경우, 이는 해당 IP 주소가 이미 네트워크의 다른 장치에서 사용 중일 수 있음을 의미합니다. 네트워크 관리자에게 새 IP 주소를 받아 장치를 다시 설치하십시오.
Request timed out을 수신하는 경우 이는 Axis 장치에 IP 주소를 사용할 수 있음을 의미합니다. 모든 케이블 배선을 확인하고 장치를 다시 설치하십시오.
동일한 서브넷에 있는 다른 장치와 IP 주소 충돌이 발생할 수 있습니다. DHCP 서버에서 다이내믹 주소를 설정하기 전에 Axis 장치의 고정 IP 주소가 사용되었습니다. 즉, 동일한 기본 고정 IP 주소를 다른 장치에서도 사용하는 경우, 해당 장치에 액세스하는 데 문제가 발생할 수 있습니다.
장치 액세스 관련 문제
브라우저로 장치에 액세스할 때 로그인할 수 없음
HTTPS가 활성화된 경우, 로그인 시 올바른 프로토콜(HTTP 또는 HTTPS)을 사용해야 합니다. 브라우저 주소창에 http 또는 https를 직접 입력해야 할 수 있습니다.
root 계정의 패스워드를 분실한 경우, 장치를 공장 초기화 설정으로 재설정해야 합니다. 지침에 대해서는공장 출하 시 기본 설정으로 재설정 항목을 참조하십시오.
IP 주소가 DHCP에 의해 변경됨
DHCP 서버가 할당한 IP 주소는 유동 IP 주소이므로 변경될 수 있습니다. IP 주소가 변경된 경우에는 AXIS IP Utility 또는 AXIS Device Manager를 사용하여 네트워크에서 장치를 찾습니다. 해당 모델이나 일련 번호 또는 DNS 이름을 이용하여 장치를 식별합니다(이름이 구성된 경우).
필요한 경우, 고정 IP 주소를 수동으로 할당할 수 있습니다. 지침에 대한 자세한 내용은 axis.com/support로 이동하여 확인하십시오.
IEEE 802.1X를 사용하는 동안 발생하는 인증 오류
인증이 제대로 작동하려면 Axis 장치의 날짜 및 시간이 NTP 서버와 동기화되어야 합니다. System > Date and time(시스템 > 날짜 및 시간)으로 이동합니다.
비디오 분석 감지가 없으면 카메라는 이미지에 투영된 레이더 감지를 표시하며, 이는 비디오 분석 바운딩 박스만큼 정확하지 않습니다. 이는 경사길, 언덕 또는 움푹 팬 곳처럼 장면의 고도 차이로 인해서도 발생할 수 있습니다.
박스가 너무 높거나 낮은 경우 설치 높이가 올바르게 설정되었는지 확인하십시오. 자동 보정 기능을 사용하여 바운딩 박스의 정확도를 향상시킬 수도 있습니다. 자동 보정을 사용하려면 Radar > Autocalibration(레이더 > 자동 보정)으로 이동하십시오.
바운딩 박스에는 실제로 2명이 있을 때 1명이 표시됩니다.
두 사람이 가까이 걷고 있고 레이더에만 감지되면 한 사람으로 분류되어 하나의 바운딩 박스만 나타납니다. 분석 융합 영역에 진입하면 정확하게 분류됩니다.
경계 상자는 객체를 추적할 때 그 위치를 옮깁니다.
레이더 분석과 카메라 분석이 둘 다 같은 객체를 감지할 때나 카메라 분석만 객체를 감지하는 경우 바운딩 박스는 카메라 정보를 사용하여 객체 주위에 밀접하게 그려집니다.
비디오 감지가 손실되면 바운딩 박스는 레이더 프로젝션 위치에 그려지며, 이 경우 정확도가 떨어집니다. 비디오 감지를 다시 선택하면 바운딩 박스가 올바른 위치에 다시 그려집니다.
자동 보정 기능을 사용하여 바운딩 박스의 정확도를 향상시킬 수도 있습니다. 자동 보정을 사용하려면 Radar > Autocalibration(레이더 > 자동 보정)으로 이동하십시오.
설명서에 나오는 것만큼 감지 거리가 나오지 않습니다.
다음은 감지 거리에 영향을 미치는 몇 가지 요소입니다.
설정에서 올바른 높이가 입력되었는지 확인합니다.
설치 지점에 대한 객체의 접근 각도에 따라 감지 거리가 달라질 수 있습니다. 화각의 외곽 부분에서 감지 감도는 레이더 시점에서 더 낮습니다. 침입자가 도달할 가장 먼 거리로 예상되는 곳을 향해 AXIS Q1656-DLE를 조준하는 것을 고려해야 합니다.
허위 알람은 어떻게 최소화할 수 있나요?
허위 알람을 최소화하기 위한 몇 가지 팁:
비디오 분석의 감지 확률을 최대화하기 위해 장면의 조명이 밝은지 확인해야 합니다.
AXIS Object Analytics에서 감도를 Low(낮음)로 설정합니다. 이렇게 하려면 알람을 트리거하기 전에 비디오 분석과 레이더 분석이 일치해야 합니다.
레이더의 제외 구역을 사용하여 흔들리는 초목 및 건물과 같이 이미 알고 있는 허위 감지 소스를 무시합니다.
낮은 감도를 사용하도록 레이더를 구성합니다.
AXIS Object Analytics에서 제외 구역 사용
사이트의 잔디를 짧게 유지하십시오.
레이더 간섭
장치는 두 개의 레이더 채널 중 하나를 사용합니다. 각 채널 내에서 최대 4개의 레이더는 해당 주파수를 가장 잘 사용하는 방법을 협상할 수 있습니다. 이 기능에도 불구하고 때로 카메라의 간섭에 대한 경고 메시지가 표시될 수 있습니다. 이후에 각 장치의 채널을 수동으로 선택할 수 있습니다.
서로 물리적으로 가까운 장치는 같은 채널로 설정되어야 합니다. 이렇게 하면 장치가 더 쉽게 간섭을 피할 수 있습니다.