解决方案概述
雷达视频融合摄像机是一种具有完全集成雷达模块的视觉摄像机。因此,它可以单独或组合使用雷达和视频来侦测和分类物体。
使用雷达-视频融合的好处是更准确的侦测和分类,以减少误报及错失报警。这两种技术的融合在 AXIS Object Analytics 中结合在一起,这是用于访问和配置雷达视频融合的主要界面。
AXIS Q1656-DLE 可对具有深度的广区域内的物体进行侦测和分类,您可将其用于区域监控或道路监控。此外,AXIS Q1656-DLE 在结合其他设备的现场设计中也能很好地工作。由于 AXIS Q1656-DLE 中雷达的侦测范围大于摄像机的视野,因此您可以将其与带有IR照明的 PTZ 摄像机相结合,以帮助在雷达的整个侦测范围内实现视觉确认。或将其与热成像摄像机结合使用,热成像摄像机可侦测长而窄区域中的物体并对其进行分类。
为什么要融合?
单独使用视频和雷达都有自己的优势和局限性:
当有足够的对比度时以及当物体靠近摄像机时,视频通常提供更准确的分类。它还将提供比雷达更精细的分类。然而,摄像机需要良好的照明条件才能观看。
另一方面,即使在具有挑战性的照明条件下,雷达也能侦测到物体,并且其侦测和分类范围更长。无论天气状况如何,雷达都可以测量移动物体的速度、方向和距离。然而,缺乏视觉确认可能会使雷达分类更加脆弱。摆动物体和反射表面可能会触发假警报,在设计场地和配置雷达时必须考虑到这一点。
雷达视频融合摄像机中的两种技术当然可以单独使用,但当这两种技术的分析相互作用以提供更可靠的侦测和分类时,它们会更强大。
解释雷达视频融合
- 该产品以两种方式将雷达数据与视频数据合成:
视觉合成:雷达侦测和分类被合成到视频图像中。这是一种在视频分析不可用时在视频流中可视化雷达数据的方法。
例如,如果一个物体出现在距离 50 米(164 英尺)处,则其可能太小,视频分析无法侦测到,但雷达可以识别它。在这种情况下,雷达侦测被合成到图像平面中,可用于触发 AXIS Object Analytics 内部的警报。
分析合成:雷达侦测和分类与视频分析中的侦测和分类合成。这为设备提供了一个组合的分析输出,其中融合了两种技术的各自优势。它使用来自雷达的距离和速度,以及来自视频的位置和类别。
当上面示例中的物体靠近时,视频分析也会检测到它。然后,雷达侦测与视频分析合成,产生比这两种技术单独提供的质量更高、信息更多的输出。
安装
预览模式
在安装期间微调摄像机视图时,预览模式对安装者来说是非常理想。无需登录即可在预览模式下访问摄像机视图。它仅在出厂默认状态下提供,可由设备供电在有限时间使用。
安装指南
可在 axis.com/products/axis-q1656-dle/support#support-resources 上找到本产品的安装指南以及其他文档
注意事项
产品安装位置
为了获得理想的视频及雷达覆盖范围,须妥当安装产品。安装雷达-视频融合摄像机时,请考虑以下事项:
区域或道路监控
该产品适用于监控开放区域,可以将其用于区域监控或道路监控。有关安装示例和使用案例,请参见区域装置和道路装置。
避免实体物体和反射物体
实体和金属物体会影响AXIS Q1656-DLE中雷达的性能。覆盖区域内的大多数实体物体(如墙壁、栅栏、树木或大灌木丛)都会在其后面形成一个盲点(雷达阴影)。视野中的金属物体导致反射会影响雷达执行分类的能力。这可能会导致雷达流中出现重影轨迹和假警报。
- 实际侦测
- 反射侦测(鬼迹)
有关如何处理雷达覆盖区域内的固定和反射物体的信息,请参见 添加排除区域。
安装位置
将产品安装在没有其他物体或装置的稳定立杆或墙面的一个点上。产品左侧和右侧 1 米(3 英尺)以内的物体,反映无线电波,从而影响 AXIS Q1656-DLE 内雷达的性能。
如果将产品安装在墙壁上,则产品应至少与墙壁成 15° 角。
此外,安装高度也会影响视频和雷达的探测距离和范围。
垂直转动角度
产品必须充分面向地面,使图像中心位于地平线以下。建议的安装倾斜度为 15–45°。
您可以在雷达的实时浏览中添加叠加,显示产品的垂直转动角度。有关说明,请参见显示雷达垂直转动角度文本叠加。
滚转角
产品的滚转角必须几乎等于零,这意味着图像应该与地平线齐平。
共存
如果将超过八个在 60 GHz 频段工作的雷达或雷达视频融合摄像机近距离安装在一起,它们可能会互相干扰。为避免干扰,请参见 安装多个 Axis 雷达设备。
安装多个 Axis 雷达设备
共存
雷达的无线电波 AXIS Q1656-DLE 持续超出侦测区域,可能会干扰其他雷达,干扰范围可远达 350 米(380 码)。这称为共存区域。
- 合成摄像机
- 侦测区域
- 共存区
AXIS Q1656-DLE在 60 GHz 频段上运行。您可以安装多达八个工作频段为 60 GHz 的 Axis 雷达或雷达视频融合摄像机,彼此靠近或相互面对而不会引起问题。内置的共存算法可以找到一个合适的时间槽和频率通道,会尽可能减少干扰。
如果装置包含八个以上在同一频段工作的雷达设备,并且许多设备彼此远离,则干扰风险较小。一般来说,雷达干扰不会导致雷达停止工作。即使存在干扰,也有一种内置干扰缓解算法可尝试修复雷达信号。在许多在同一频段工作的雷达在同一共存区域运行的环境中,预计会出现干扰警告。干扰的主要影响是侦测性能下降,以及偶尔出现的迭影轨迹。
您可以将雷达-视频融合摄像机与在其他频段运行的 Axis 雷达相结合,而无需考虑共存问题。在不同频段工作的 Axis 雷达设备不会相互干扰。
雷达覆盖范围
AXIS Q1656-DLE的雷达水平侦测视野为95°。雷达的侦测范围取决于场景、产品安装高度和倾斜角度以及运动物体的大小和速度等因素。
检测范围还取决于您选择的监控配置文件。您可使用 AXIS Q1656-DLE 进行区域或道路监控,雷达中有两个配置文件针对每种场景进行了优化:
Area monitoring profile(区域监控配置文件):雷达跟踪并分类以低于55 km/h (34 mph)的速率移动的人、车辆和未知物体。有关侦测范围的信息,请参见 区域侦测范围。
Road monitoring profile(道路监控配置文件):雷达主要跟踪并分类以高达200 km/h (125 mph)的速度行驶的车辆。有关侦测范围的信息,请参见 道路侦测范围。
- 注意
当雷达和视频在 AXIS Object Analytics 中组合在一起时,AXIS Q1656-DLE 可以对车辆子类别(公共汽车、汽车、自行车、卡车等)进行分类。
在产品的网页界面中选择区域或监控配置文件。有关说明,请参见选择雷达配置文件。
覆盖范围
此设备中的雷达的水平侦测视野为95°。覆盖面积相当于人类2700 m2 (29000 ft2) 和车辆6100 m2 (65600 ft2)。
理想区域覆盖范围适用于安装在 3.5–7 米(11–23 英尺)处的产品。安装高度将影响雷达下方的盲区大小。
区域侦测范围
该区域监控配置文件专为侦测和追踪人员而优化,但同时也让您能够追踪车辆及其他缓慢移动的目标。
以理想安装高度安装时,侦测范围为:
5–60 米(16–200 英尺)(对于人)。
5–90 米(16–300 英尺)(对于车辆)。
在以下条件下测量了雷达侦测范围:
范围将沿地面测量。
物体为一个身高170厘米(5英尺7英寸)的人。
人径直走到雷达前方。
当人进入侦测区域时,便开始测量数值。
雷达灵敏度设置为中。
| 安装高度 | 15° 垂直转动 | 20° 垂直转动 | 25° 垂直转动 | 30° 垂直转动 | 35° 垂直转动 | 40° 垂直转动 | 45° 垂直转动 |
|---|---|---|---|---|---|---|---|
| 3.5 米 (11英尺) | 6.0–60+米 (19–196+英尺) | 5.0–60+米 (16–196+英尺) | 4.0–60+米 (13–196+英尺) | 4.0–60米 (13–196英尺) | 4.0–55米 (13– 180英尺) | 4.0–40米 (13–131英尺) | 4.0–30米 (13–98英尺) |
| 4.5 米 (14英尺) | 6.0–60+米 (19–196+英尺) | 6.0–60+米 (19–196+英尺) | 5.0–60+米 (16–196+英尺) | 4.0–60+米 (13–96+英尺) | 4.0–60米 (13–196英尺) | 4.0–45米 (13–147英尺) | 4.0–40米 (13–131英尺) |
| 6 米 (19英尺) | 10–60+米 (32–196+英尺) | 9.0–60+米 (29–196+英尺) | 7.0–60+米 (22–196+英尺) | 6.0–60+米 (19–196+英尺) | 6.0–60米 (19–196英尺) | 5.0–55米 (16–180英尺) | 5.0–55米 (16–180英尺) |
| 8 米 (26 英尺) | 16–60米 (52–196英尺) | 14–60米 (45–196英尺) | 10–60米 (32–196英尺) | 8.0–60+米 (26–196+英尺) | 8.0–60+米 (26–196+英尺) | 7.0–60米 (22–196英尺) | 7.0–60米 (22–196英尺) |
| 10 米 (32英尺) | 21–60米 (68–196英尺) | 19–60米 (62–196英尺) | 14–60米 (45–196英尺) | 12–60+米 (39–196+英尺) | 10–60+米 (32–196+英尺) | 9.0–60米 (29–196英尺) | 9.0–60米 (29–196英尺) |
| 12 米 (39英尺) | 25–60米 (82–196英尺) | 23–60米 (75–196英尺) | 19–60米 (62–196英尺) | 16–60+米 (52–196+英尺) | 13–60+米 (42–196+英尺) | 11–60米 (36–196英尺) | 11–55米 (36–180英尺) |
- 校准雷达时,请在网页界面中输入安装高度。
- 侦测范围受现场场景、设备倾斜角度以及移动物体的类型和大小影响。
- 将雷达灵敏度设置为低将使侦测范围减少 20%,而将其设置为高将使侦测距离增加 20%。
- 在您预计小动物会出现在融合区之外,但仍在雷达侦测区域的装置中,您可以通过将雷达灵敏度设置为低来尽量减少误报。然而,这将减小侦测范围。
道路侦测范围
道路侦探文件针对车辆侦测进行了优化,在监控速度高达 200 公里/小时(125 英里/小时)的车辆时,速度精度为 +/- 2 公里/小时(1.24 英里/小时)。
雷达-视频融合摄像机的安装高度和车速都会影响雷达的探测范围。当雷达安装在理想安装高度时,可在以下范围内以 +/- 2 公里/小时(1.24 英里/小时)的速度精度侦测驶近和驶离的车辆:
25–100 米(82–328 英尺),适用于以 50 km/h (31 mph) 速度移动的车辆。
40–80 米(131–262 英尺),适用于以 100 km/h (62 mph) 速度移动的车辆。
50–70 米(164–230 英尺),适用于以 200 km/h (125 mph) 速度移动的车辆。
为了尽量降低高速行驶车辆侦测遗漏的风险,可在雷达中设置一个场景,触发物体类型为车辆和未知。有关如何设置场景的详细信息,请参见 添加场景。
雷达视频融合覆盖范围
分析融合区是两种技术都可以侦测和分类物体的区域,取决于以下因素:
摄像机的安装高度。
摄像机的倾斜角度。
摄像机镜头的变焦级别。
周围环境的照明条件,以及摄像机本身和现场其他设备提供的光线。
到移动对象的距离。
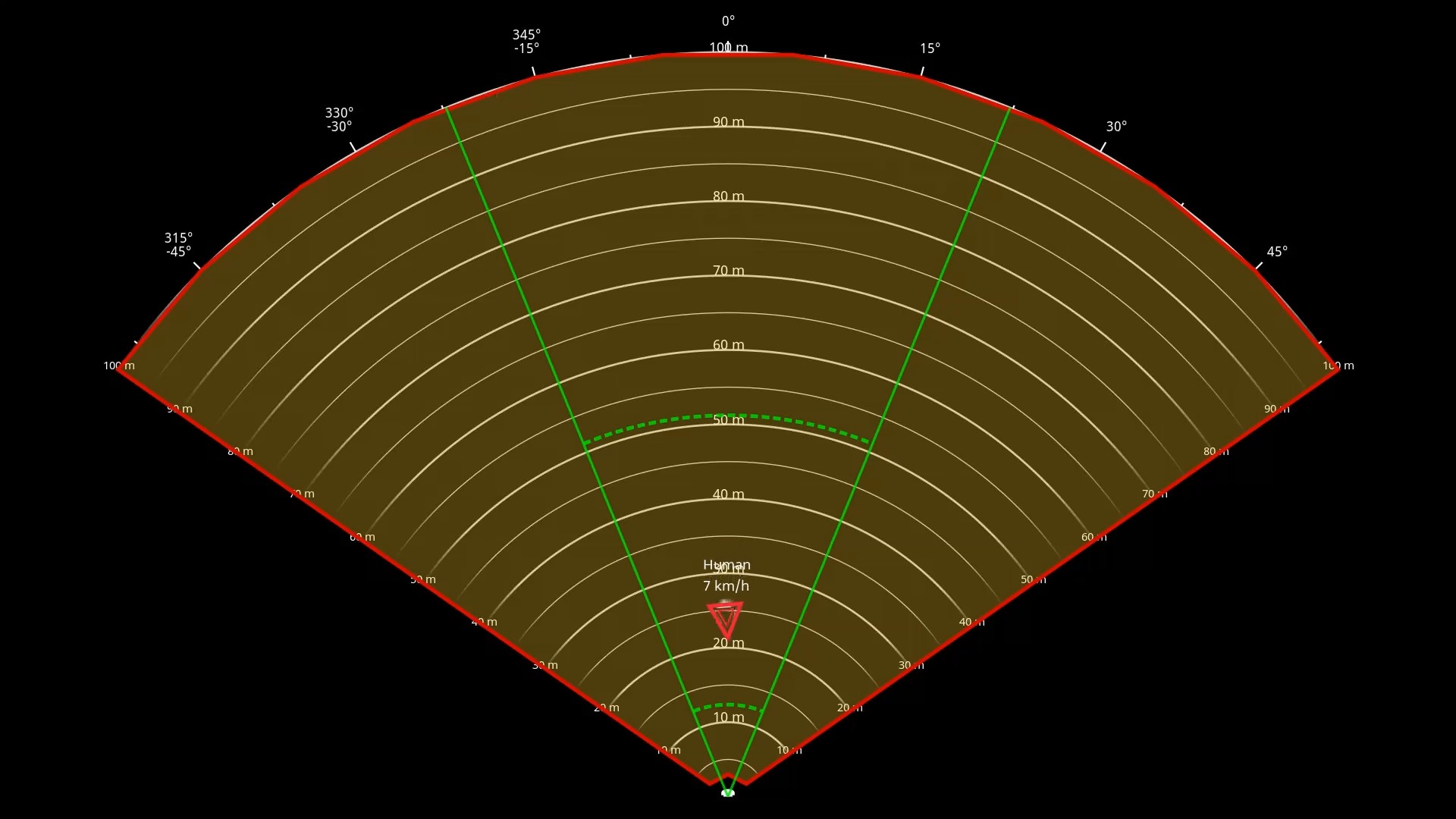
一旦安装了雷达视频融合摄像机,雷达覆盖范围就固定了。然而,摄像机的视野取决于镜头的变焦水平。
为了使摄像机的视野与雷达覆盖范围相关,雷达流中有两条绿线,代表摄像机的近似视野。当摄像机放大或缩小时,线条将进行调整。此外,还有两条虚线表示摄像机可以看到的大致区域。离设备较近的虚线表示近侦测极限,离设备较远的虚线表示远侦测极限。
变焦级别示例
分析融合区的大小受AXIS Q1656-DLE中镜头等级的影响。变焦等级的上下限如下所述。
镜头缩小(上限宽度)
当 AXIS Q1656-DLE 中的镜头被尽量缩小时,物体可能会变得太小,无法进行视频分析。在这种情况下,雷达很可能会侦测到覆盖范围很广的物体,但视频分析不会侦测到。如果您想在雷达的整个侦测范围内建立视觉确认,您可以将 AXIS Q1656-DLE 与一个或多个 PTZ 摄像机配对。
镜头放大(远摄上限)
当镜头被尽量放大时,它将显著限制摄像机的视野。然而,由于与尽量缩小镜头时相比,远处的物体会被放大,这意味着视频分析可以在距离设备更大的距离处侦测到物体。在这种情况下,物体可能会被视频分析侦测到,但不会被雷达分析侦测到。
为了尽可能地提高雷达和视频分析对物体进行准确分类的机会,如果可能的话,调整缩放,使关注区域中的物体足够大,以便视频分析可以侦测到它们。
雷达视频侦测和分类
由于 AXIS Q1656-DLE 可以使用雷达和视频侦测和分类物体,或者只是其中一种技术,因此有几点需要注意。
如果两个人走得很近,并且被雷达侦测到而未被视频分析侦测到,他们将被归类为一个人,并且只有一个边界框框住。当它们进入分析融合区并实现视觉确认时,它们将被准确分类。AXIS Q1656-DLE中雷达的空间差为3米(9英尺)。
如果物体在摄像机视野之外,AXIS Q1656-DLE 不能将侦测或分类融合到图像平面中。这意味着 AXIS Object Analytics 无法触发警报。要在雷达仅侦测到物体时触发警报,请在雷达网页界面中配置场景,并使用条件触发雷达场景中的运动。
您在雷达网页界面中添加的排除区域是全局的,这意味着在这些区域检测到的移动都将始终被忽略 - 即使排除区域与 AXIS Object Analytics 中的分析融合区域重叠也是如此。但是,您在 AXIS Object Analytics 中添加的排除区域只会忽略 AXIS Object Analytics 场景中的移动。
区域装置
要在区域安装中获得优秀的雷达性能,请选择 AXIS Q1656-DLE 中的区域监控配置文件。有关详情,请参见 选择雷达配置文件。
区域安装示例
您可以并排放置多个雷达-视频融合摄像机,以沿或绕建筑物创建虚拟围栏。
要实现 180° 雷达覆盖范围,请将两个 AXIS Q1656-DLE 并排放置。当您并排安装多对雷达-视频融合摄像机时,我们建议每对摄像机之间的间距为 100 米(330 英尺),如示例所示。
您可以安装多达八个紧挨着的雷达-视频融合摄像机,雷达彼此间不会受到干扰。有关将 Axis 雷达设备靠近放置的详细信息,请参见安装多个 Axis 雷达设备。
区域监控使用案例
覆盖建筑物周围的开阔场地
办公楼里的公司需要确保办公场所的安全,防止入侵和故意破坏,尤其是在下班后、周末及公共假日。为了覆盖大楼周围的区域,他们安装了雷达-视频融合摄像机和 PTZ 摄像机的组合。它们配置雷达-视频融合摄像机,以便在人员和车辆接近建筑物时触发警报。为了获得尽可能可靠的检测和分类,他们在 AXIS Object Analytics 内选择适合该区域的检测灵敏度。有关检测灵敏度的详细信息,请参见 选择侦测灵敏度。
为了确保他们在整个雷达探测范围内获得潜在入侵者的视觉确认,他们在建筑物的相对角落增加了两个内置红外的 PTZ 摄像机。雷达引导 PTZ 摄像机通过 AXIS Radar Autotracking for PTZ,内置红外还为雷达-视频融合摄像机提供更多光,从而可以在更远的距离检测和识别入侵者。
覆盖有围栏的建筑物
通常将货物存放在场所内的仓库被围栏包围,以防止入侵者进入。为了侦测潜在的入侵者,他们安装了雷达-视频融合摄像机和具有内置红外的 PTZ 摄像机的组合,以确保场所安全。雷达-视频融合摄像机可提供可靠的侦测并触发警报,而 PTZ 摄像机则可扩大视觉覆盖范围。PTZ 摄像机内置红外还为雷达-视频融合摄像机提供更多光,从而可以在更远的距离检测和识别入侵者。
在此场景中,围栏外的区域未被覆盖,因为它是一个可能触发假警报的繁忙区域。在活动较少的场景中,围栏外的区域也可以被覆盖。在这样的场景中,可以将摄像机配置为在检测到围栏外的移动时触发外部灯光,以阻止潜在的入侵者。当在围栏内实际检测到入侵者时,它们也可能触发警报。为了能够侦测围栏外的移动,摄像机需要安装得足够高。
覆盖关键资产
包含关键设备和电缆的电信掩体周围环绕着围栏,以防止入侵者进入。为了避免遮挡和破坏,他们需要额外的保护。由于将假警报尽可能降低很重要,因此他们在场所的相对角落安装了两个雷达视频融合摄像机。这些摄像机可以共同覆盖掩体、天线和地面。通过在雷达-视频融合摄像机中同时使用雷达和视频技术,摄像机可以提供对潜在入侵者的可靠侦测和分类。
可以通过这种方式将雷达-视频融合摄像机面对面放置,而不会在雷达之间产生干扰。但是,为了确保视频技术能够提供准确的检测和分类,需要良好的照明条件。
覆盖装卸区周围区域
商业建筑的装卸区被围栏包围以保护建筑。为了提高安全性,该公司在现场安装了一台热成像摄像机和三台雷达-视频融合摄像机。为了侦测潜在的入侵者,他们沿着围栏安装热像仪。为了检测设法通过围栏的入侵者,他们将两个雷达视频融合摄像机安装在面向装卸码头的杆子上。这些摄像机将能够检测和分类在码头周围移动的人员和车辆,并可在工作时间后触发警报。为了检测通过转折点在右侧的区域的入侵者,他们另外安装了面向该区域的雷达-视频融合摄像机。还有一点,热成像摄像机还有助于侦测安装在围栏附近的两个摄像机的篡改行为。
道路装置
要在道路安装中获得优秀的雷达性能,请选择 AXIS Q1656-DLE 中的道路监控配置文件。有关详情,请参见 选择雷达配置文件。
道路安装示例
在监控道路和高速公路时,确保将雷达-视频融合摄像机安装在足够高的位置,避免在车辆后方形成盲点(雷达阴影)。
雷达阴影的大小取决于雷达-视频融合摄像机的安装高度以及车辆的高度和与雷达的距离。例如,当高度为 4.5 米(15 英尺)的车辆距离安装在 8 米(26 英尺)高处的雷达-视频融合摄像机 50 米(164 英尺)时,车辆后方的雷达阴影将为 50 米(164 英尺)。但是,如果雷达-视频融合摄像机安装在 12 米(39 英尺)的高度,则同一车辆后方的雷达阴影只有 23 米(74 英尺)。
侧面安装
要监控沿道路行驶的车辆,可以将雷达-视频融合摄像机安装在路边,例如电线杆上。在这种类型的安装中,我们建议平移角度上限为 25°。
为了使 AXIS Q1656-DLE 中的雷达能够精确测量高速,请将雷达-视频融合摄像机放置在距离车辆 10 米(32 英尺)的横向距离内。有关侦测范围和速度精确度的详细信息,请参见 道路侦测范围。
中心安装
要监控多车道道路上的车辆,可以在道路上方的龙门架上安装一个或多个雷达-视频融合摄像机。
如果要监控远离雷达-视频融合摄像机而不是驶向它的车辆,也可以采用同样类型的安装。
您还可以将雷达-视频融合摄像机放置在龙门架上,俯瞰带交通信号灯的人行横道,例如记录离开车辆的速度或检测超速行为。
为了使 AXIS Q1656-DLE 中的雷达能够精确测量高速,请将雷达-视频融合摄像机放置在距离车辆 10 米(32 英尺)的横向距离内。有关侦测范围和速度精确度的详细信息,请参见 道路侦测范围。
道路监控用例
高速公路匝道上的逆向行驶侦测
为了检测和识别在高速公路匝道上错向行驶的车辆,交通管制将 AXIS Q1656-DLE 安装在面向匝道的立杆上。为了实现可靠的侦测,他们在网页界面的雷达页中设置了一个越线场景,并将雷达配置为车辆必须跨越两条线才会触发警报。在雷达场景中,它们将两条线定位在匝道上,如图所示,并指定要触发的行驶方向和速度。通过这种配置,雷达将触发警报,摄像机可以提供匝道上车辆的视觉识别。有关如何雷达场景的详细信息,请参见 添加场景。
监控十字路口的交通流量 – 车龙集结
要监控繁忙十字路口的车龙是如何以及何时形成的,交通管制部门在十字路口上方的龙门架上安装了 AXIS Q1656-DLE。他们在 AXIS Object Analytics 中 设置区域对象场景,该场景将在区域内移动的车辆上触发。它们将场景塑造为仅覆盖通向交叉路口的道路部分,并选择适合场景的检测灵敏度。为了在车龙开始集结时触发警报,他们将场景配置为在车辆行驶速度低于 5 公里/小时(3 英里/小时)时触发。有关如何配置 AXIS Object Analytics 分析场景和选择合适的检测灵敏度的信息,请参见 配置 AXIS Object Analytics。
监控十字路口的交通流量 – 方向
为了解繁忙十字路口的交通流量和车辆行驶方向,交通管制部门在通往十字路口的道路上方的龙门架上安装了 AXIS Q1656-DLE。他们在设备网页界面的雷达页面中设置了一个越线场景,车辆必须跨越两条线才会触发警报。在配置雷达场景时,他们将两条线中的首条线放置在通往十字路口的车道上,就在人行横道之后,以避免车辆停在该线上。他们将第二条线放置在通往右侧的车道上。车辆必须沿指定方向跨越两条线才会触发警报。为了避免每次跨越触发时有多辆车辆跨越,他们将雷达场景中的触发持续时间下限从 2 秒降至 0 秒。
为了监控各个方向的交通流,他们为每个方向创建了一个雷达场景。有关如何雷达场景的详细信息,请参见 添加场景。
雷达场景不会计算越线车辆的数量,您可以使用设备网页界面中的事件系统进行计数。对车辆进行计数的一种方法是每次雷达场景触发时发送一条 MQTT 消息,并在 MQTT 接收器端计算触发次数。
开始使用
在网络上查找设备
若要在网络中查找安讯士设备并为它们分配 Windows® 中的 IP 地址,请使用 AXIS IP Utility 或 AXIS Device Manager。这两种应用程序都是免费的,可以从 axis.com/support 上下载。
有关如何查找和分配 IP 地址的更多信息,请转到如何分配一个 IP 地址和访问您的设备。
浏览器支持
您可以在以下浏览器中使用该设备:
ChromeTM | Edge™ | Firefox® | Safari® | |
Windows® | ✓ | ✓ | * | * |
macOS® | ✓ | ✓ | * | * |
Linux® | ✓ | ✓ | * | * |
其他操作系统 | * | * | * | * |
✓:建议
*:支持,但有限制
打开设备的网页界面
打开一个浏览器,键入安讯士设备的 IP 地址或主机名。
如果您不知道 IP 地址,请使用 AXIS IP Utility 或 AXIS Device Manager 在网络上查找设备。
键入用户名和密码。如果是首次访问设备,则必须创建管理员帐户。请参见 创建管理员帐户。
有关搭载 AXIS OS 的设备网页界面中大多数功能和设置的说明,请参阅 AXIS OS 网页界面帮助。
创建管理员帐户
安全密码
使用 HTTPS(默认已启用)通过网络设置密码或其他敏感配置。HTTPS 可实现安全加密的网络连接,从而保护密码等敏感数据。
设备密码是对数据和服务的主要保护。安讯士设备不会强加密码策略,因为它们可能会在不同类型的安装中使用。
为保护您的数据,我们强烈建议您:
使用至少包含 8 个字符的密码,而且密码建议由密码生成器生成。
不要泄露密码。
定期更改密码,至少一年一次。
确保没有人篡改过设备软件
- 要确保设备具有其原始的 AXIS OS,或在安全攻击之后控制设备,请执行以下操作:
重置为出厂默认设置。请参见 重置为出厂默认设置。
重置后,安全启动可保证设备的状态。
配置并安装设备。
网页界面概览
该视频为您提供设备网页界面的概览。
配置设备
基本设置
设置电源频率
转到视频 > 安装 > 电源线频率。
选择电源频率,然后单击保存并重启。
设置取景模式
转到视频 > 安装 >取景模式。
单击更改。
选择取景模式,然后单击保存并重新启动。
另请参阅取景模式。
调整图像
本部分包括配置设备的说明。如果您想要了解有关特定性能如何工作的更多信息,请转到 了解更多。
选择曝光模式
要提高特定监控场景的图像质量,请使用曝光模式。曝光模式让您能够控制光圈、快门速度和增益。转到视频 > 图像 > 曝光,然后在以下曝光模式之间进行选择:
对于大多数使用情况,请选择自动曝光。
对于使用某些人造光源(如荧光照明)的环境,请选择无闪烁。
选择与电流频率相同的频率。
对于使用某些人造光源和明亮光源的环境(例如,在夜间使用荧光照明并在白天使用日光照明的室外环境),请选择减少闪烁。
选择与电流频率相同的频率。
要锁定当前曝光设置,请选择保持当前设置。
Optimize IR 照明
根据安装环境和摄像机周围的条件(例如场景中的外部光源),有时可以通过手动调整 LED 的强度来提高图像质量。如果您遇到 LED 反射问题,可以尝试降低强度。
前往视频 > 图像 > 白天-夜间模式。
打开允许照明。
在实时画面中单击,然后选择Manual(手动)。
调节亮度。
使用夜间模式,可在低光照条件下的通过红外光受益
您的摄像机使用可视光在白天提供彩色图像。但随着可见光减弱,彩色图像变得不明亮和清晰。如果在发生这种情况时转换到夜间模式,摄像机将使用可视和近红外光线,以提供明亮和详细的黑白图像。您可将摄像机设置为自转换到夜间模式。
前往视频 > 图像 > 日夜转换模式,并确保红外滤光片设置为自动。
在摄像机为夜间模式时,要使用内置红外光,请打开允许照明及同步照明。
在低照度条件下降低噪声
要在低照度条件下降低噪声,您可调整下面的一种或多种设置:
调整噪声和运动模糊之间的平衡。转到视频 > 图像 > 曝光,将模糊-噪声平衡滑块移向低噪点。
将曝光模式设置为自动。
- 注意
最大快门值可导致运动模糊。
要降低快门速度,请将最大快门设置为可能的最大值。
- 注意
当您降低最大增益时,图像会变得更暗。
将最大增益设置为更低的值。
如果有Aperture(光圈)滑块,将其移向Open(打开)。
在视频 > 图像 > 外观下,降低图像中的锐度。
降低低光条件下的运动模糊
- 要在低照度条件下降低运动模糊,可调整下面的一种或多种设置:视频 > 图像> 曝光:
- 注意
当增益提高时,图像噪点也将增加。
将最大快门设置为更短的时间,将最大增益设置为更高的值。
- 如果仍存在运动模糊的问题,请执行以下操作:
提高场景中的照度等级。
安装摄像机,让目标相对于其的移动是正面靠近或远离而非侧面移动。
尽可能增加图像细节
如果在图像中尽可能增加细节,则比特率可能会增加,您可能会得到更低的帧速。
确保选择具有最大分辨率的取景模式。
前往视频 > 流 > 一般并尽可能低的压缩程度。
在实时画面下方,单击 ,然后在 Video format(视频格式)中选择 MJPEG。
前往视频 > 流 > Zipstream,然后选择关闭。
处理具有强背光的场景
动态范围是图像亮度水平的差异。在某些情况下,黑暗和明亮区域之间的差异可能很明显。结果通常会产生黑暗或明亮区域均可视的图像。宽动态范围 (WDR) 可使图像的明暗区域均可视。


- 宽动态可能会导致图像中出现伪像。
- 宽动态并非适用于全部取景模式。
转到视频 > 图像 > 宽动态范围。
打开宽动态。
使用局部对比度滑块调整宽动态量。
如果仍有问题,请转到曝光并调节曝光区域以覆盖关注区域。
可以在 axis.com/web-articles/wdr 上找到更多有关宽动态以及如何使用宽动态的信息。
使用图像稳定功能来稳定晃动的图像
图像稳定适合在符合以下条件的环境中使用:产品安装在暴露位置,可能因为风吹或交通穿流等原因发生振动。
该功能使图像更光滑、更稳定且模糊减少。还会减小压缩图像的文件大小,并降低视频流的比特率。
当您打开图像稳定时,将对图像进行轻微的裁剪,从而降低上限分辨率。
转到视频 > 安装 > 图像校正。
打开图像稳定。
使用隐私遮罩隐藏图像的某些部分
您可以创建一个或多个隐私遮罩,以隐藏部分图像。
转到视频 > 隐私遮罩。
单击 。
单击新遮罩并输入一个名称。
根据您的需求调整隐私遮罩的大小和放置。
要更改隐私遮罩的颜色,单击隐私遮罩,然后选择一个颜色。
另请参阅隐私遮罩
显示图像叠加
您可在视频流中将图像添加为叠加。
转到视频 > 叠加。
单击管理图片。
上传或拖放图片。
单击 Upload(上传)。
从下拉列表中选择图片,然后单击。
选择图像和位置。您也可在直播视图中拖动叠加图像以更改位置。
在图像中显示雷达实时浏览
使用屏幕控制可以在同一个流中查看视频和雷达的实时浏览。
转到视频 > 图像。
在实时浏览中单击以访问产品的屏幕控件。
选择预定义控制。
打开雷达画中画。
单击启用画中画。
要更改雷达投影的大小,请单击调整画中画尺寸。
要更改雷达投影的位置,请单击移动画中画。
为图像添加街道名称和罗盘方向
街道名称和罗盘方向将在视频流和录像上可见。
转到应用。
选择 axis-orientationaid。
单击打开。
要添加街道名称,请单击添加文本,然后修改文本以适合街道。
要添加指南针,请单击添加指南针然后修改指南针以适合图像。
录制并观看视频
- 直接从摄像机录制视频
转到视频 > 流。
要开始录制,请单击。
如果尚未设置存储,请单击和。有关如何设置网络存储的说明,请参见设置网络存储
要停止录制,再次单击。
- 观看视频
转到录制。
在列表中单击以查看您的录制内容。
查看并录制视频
本部分包括配置设备的说明。要了解有关流和存储的工作原理的更多信息,请转到 流传输和存储。
降低带宽和存储
降低带宽可能导致图像中的细节损失。
转到视频 > 流。
在直播视图中单击。
如果设备支持视频格式 AV1,请选择此格式。否则选择 H.264。
转到视频 > 流 > 常规并增加压缩。
转到视频 > 流 > Zipstream 并执行以下一个或多个操作:
- 注意
Zipstream 设置用于除 MJPEG 以外的所有视频编码。
选择您要使用的 Zipstream 级别。
打开存储优化。仅当视频管理软件支持 B 帧时,才可使用此选项。
打开动态 FPS。
打开动态 GOP 并设置高 GOP 长度值的上限。
大多数网页浏览器不支持 H.265 的解码,因此这款设备在其网页界面中不支持这种情况。相反,您可以使用支持 H.265 解码的视频管理系统或应用程序。
设置网络存储
- 要在网络上存储录制内容,您需要设置网络存储。
转到系统 > 存储。
单击添加网络存储(在Network storage(网络存储)下)。
输入主机服务器的 IP 地址。
在网络共享下键入主机服务器上共享位置的名称。
键入用户名和密码。
选择 SMB 版本或将其保留在自动状态。
如果遇到临时连接问题或尚未配置共享,选中添加共享而不测试。
单击添加。
配置雷达
雷达视频融合摄像机经过工厂校准,使摄像机和雷达模块完全对准。请勿移动或卸下镜头、光学单元或雷达模块,因为这样会使校准和对准失效。
选择雷达配置文件
该雷达-视频融合摄像机中的雷达有两个配置文件;一个针对区域监控进行了优化,另一个针对道路监控进行了优化。选择适合您的安装类型的配置文件。
- 在网页界面:
转到雷达 > 设置 > 侦测。
选择在雷达配置文件下选择一个配置文件。
设置安装高度
在雷达的网页界面中设置设备的安装高度。这有助于雷达正确侦测物体经过时的速度。
尽可能准确地测量从地面到设备的高度。对于表面不平整的场景,请设置代表场景中平均高度的值。
如果高度设置不正确,在 AXIS Object Analytics 中,侦测到对象时出现的边界框将不会出现在准确的位置。
转到雷达 > 设置 > 常规。
在安装高度下设置高度。
您也可以在 AXIS Object Analytics 中设置安装高度。在一个位置设置高度将自动填充在另一个位置的安装高度。
转到应用 > AXIS Object Analytics。
打开应用,然后单击打开。
单击设置。
在安装高度下设置高度。
确认安装高度
要确认您已测量并设置了正确的设备安装高度,请在摄像机的实时画面中添加增强叠加。叠加由投射在运动物体周围的白色边界框组成。
转到视频 > 图像。
在实时画面中单击以访问设备的屏幕控件。
拓展预定义控制。
打开增强叠加(雷达)。
单击切换增强边界框。
让某人在您监控的场景中移动,并在摄像机的实时画面中检查边界框是否投射在运动物体的周围,而不是其上方、下方或旁边。
如有必要,重新测量安装高度,调整设置,然后再次检查。
- 完成验证后关闭增强叠加。
如果场景包含高程变化,可使用自动校准功能,根据雷达侦测结果提高边界框的准确度。有关详细信息,请参见 自动校准设备。
校准参考地图
为便于查看检测到的目标移动轨迹,您可上传地图作为参考。您可以使用显示雷达覆盖区域的平面图或航拍照片。校准地图,使雷达视图适配地图的位置、方向和比例,如果您对场景的特定部分感兴趣,还可以将地图放大。
您可以使用设置助手一步步完成地图校准,也可以单独编辑每个设置。
- 使用设置助手:
转到雷达 > 地图校准。
单击Setup assistant(设置助手)并按说明操作。
- 要删除上传的地图和您添加的设置,请单击Reset calibration(重置校准)。
- 单独编辑每个设置:
- 调整每个设置后,地图将逐渐校准。
转到Radar(雷达)> Map calibration(地图校准)> Map(地图)。
选择要上传的图像,或将其拖放到指定区域。
要以当前水平转动和变焦缩放设置重新使用地图图像,请单击Download map(下载地图)。
在Rotate map(旋转地图)下方,使用滑块将地图旋转到位。
转到Scale and distance on a map(地图上的比例尺和距离) ,单击地图上的两个预定点。
在Distance(距离)下,添加您添加到地图上的两点之间的实际距离。
转到Pan and zoom map(水平转动和变焦缩放地图),使用按钮水平转动地图图像或放大、缩小地图图像。
- 注意
变焦缩放功能不会改变雷达的覆盖范围。即使变焦缩放后部分覆盖区域超出画面,雷达仍会侦测目标区域内的移动物体。排除侦测到的移动情况的唯一方法是添加排除区域。有关详细信息,请参见 添加排除区域。
转到Radar position(雷达位置),使用按钮移动或旋转雷达在地图上的位置。
- 要删除上传的地图和您添加的设置,请单击Reset calibration(重置校准)。
设置侦测区域
要确定移动侦测的位置,可以添加一个或多个侦测区域。使用不同的区域触发不同的操作。
- 有两种区域类型:
场景(以前称为包含区域)是移动物体将在其中触发规则的区域。默认方案与雷达覆盖的目标区域相匹配。
排除区域是将忽略移动物体的区域。如果场景内存在触发大量不必要的警报的区域,请使用排除区域。
添加场景
场景是触发条件和检测设置的组合,可用于在事件系统中创建规则。如果要为场景的不同规则创建不同的事件,请添加场景。
- 添加场景:
转到雷达 > 场景。
单击添加场景。
键入场景的名称。
如果您希望物体在区域中移动或物体跨越一条或两条线时触发,请选择此选项。
- 物体在区域内移动时触发:
选择在区域中移动。
单击Next(下一步)。
选择场景中应包含的区域类型。
使用鼠标来移动和重塑区域,使该区域覆盖雷达图像或参考地图中所需的部件。
单击Next(下一步)。
添加侦测设置。
在忽略短暂停留的物体下添加触发前的秒数。
在对象类型触发下选择要触发的对象类型。
在速度限制下添加速度限制的范围。
单击Next(下一步)。
在触发持续时间下限下设置警报的下限持续时间。
单击 Save(保存)。
- 对象越界时触发:
选择越线。
单击Next(下一步)。
在场景中定位线。
使用鼠标移动线条和修改线条形状。
要更改侦测方向,请启用更改方向。
单击Next(下一步)。
添加侦测设置。
在忽略短暂停留的物体下添加触发前的秒数。
在对象类型触发下选择要触发的对象类型。
在速度限制下添加速度限制的范围。
单击Next(下一步)。
在触发持续时间下限下设置警报的下限持续时间。
默认值设为 2 秒。如果希望在物体每次越线时触发场景,请将持续时间降低为 0 秒。
单击 Save(保存)。
- 物体跨越两条线时触发:
选择越线。
单击Next(下一步)。
要使物体跨越两条线以触发警报,请打开 要求跨越两条线 。
在场景中定位线。
使用鼠标移动线条和修改线条形状。
要更改侦测方向,请启用更改方向。
单击Next(下一步)。
添加侦测设置。
在跨越之间的上限时间下设置跨越首条线与第二条线的时间限制。
在对象类型触发下选择要触发的对象类型。
在速度限制下添加速度限制的范围。
单击Next(下一步)。
在触发持续时间下限下设置警报的下限持续时间。
默认值设为 2 秒。如果希望在物体每次跨越两条线时触发场景,请将持续时间降低为 0 秒。
单击 Save(保存)。
添加排除区域
排除区域是将忽略移动物体的区域。添加排除区域以忽略,例如,路边摇曳的树叶等。您还可以添加排除区域以忽略由雷达反射材料(例如金属围栏)引起的迭影轨迹。
- 添加排除区域:
转到雷达 > 排除区域。
单击添加排除区域。
使用鼠标来移动和重塑区域,使该区域覆盖雷达视图或参考地图中所需的部分。
自动校准设备
雷达-视频融合摄像机的自动校准可提高 AXIS Object Analytics 中侦测对象周围出现的边界框的准确性。通过自动校准,该设备使用视频中的信息(如高度和角度精度)来根据雷达检测改善边界框的定位。
自动校准不会影响检测,只会影响边界框的可视化。
- 对于高度校准:
转到雷达 > 自动校准 > 高度。
打开自动校准。
一旦校准数据可用,就会自动校准。
选择平滑选项。
如果场景的高度变化很小,请将平滑设置为高。
如果场景是丘陵或倾斜的,或者如果它包含楼梯或高建筑物,请将平滑设置为低以保持高度差异。
使用以下选项在网页界面中可视化校准结果:
显示高度模式以彩色点模式显示从地面到摄像机的垂直距离。
显示颜色图例显示包含高程图案的颜色以及每种颜色表示的垂直距离的图例。
显示参考区域显示校准所基于的区域。
- 对于方位角校准:
转到雷达 > 自动校准 > 方位角。
打开自动校准。
一旦校准数据可用,就会自动校准。
显示雷达垂直转动角度文本叠加
您可以在雷达的实时浏览中添加叠加,显示雷达的垂直转动角度。这在安装过程中或您需要了解设备垂直转动角度时很有用。
当设备水平时,倾斜角度叠加显示“90”。如果叠加显示“75”,则雷达的倾斜角度在水平线以下 15°。
转到雷达 > 叠加。
选择Text(文本),然后单击。
键入 #op。
也可以单击调节器,然后从列表中选择 #op。
选择一个位置。也可以在实时浏览中拖动叠加字段来更改位置。
配置 AXIS Object Analytics
AXIS Object Analytics 是一个基于 AI 的应用程序,用于侦测移动对象并对其进行分类。这也是在AXIS Q1656-DLE中配置雷达视频融合的主接口。融合的实时输出只能在应用程序中配置的场景内的视频流中看到。
创建一个场景
使用 AXIS Object Analytics 中的场景定义雷达-视频融合摄像机的检测设置和触发条件。
在设备的网络界面中,转到应用 > AXIS Object Analytics。
开始该应用程序,然后单击打开。
在欢迎页面,单击分步骤并遵循推荐的设置流程。
在 注意事项中,通读信息,然后单击完成。
单击 + 新场景。
- 注意
默认情况下,区域中的对象 和线交叉场景都使用视频和雷达输入。AXIS Object Analytics 中的其他场景仅使用视频输入。
根据您的要求选择场景。
选择您希望应用程序侦测的物体类型。
配置您的场景。
验证您的设置,然后单击完成。
- 注意
要获得移动目标周围的边界框,转到设置,打开元数据叠加。当您创建两个场景,其中一个场景同时使用视频和雷达输入,而另一个场景只使用视频输入时,移动目标周围就会出现双边界框。这种行为是意料之中的。
现在,您已在 AXIS Object Analytics 中创建了一个场景。若要修改场景并应用其他设置,请单击打开。对于同时使用雷达和视频输入的场景,您可以使用速度来触发并选择检测灵敏度。有关说明,请参见:
要了解有关 AXIS Object Analytics 及其常规设置的更多信息,请参见 AXIS Object Analytics 用户手册。
AXIS Object Analytics 用户手册描述的一些注意事项和功能不适用于雷达-视频融合摄像机。
使用速度触发
如果您在 AXIS Object Analytics 中创建了区域中的对象或线交叉场景,则可以在设定速度范围内或高于和低于设定速度范围内的对象上触发。
转到应用 > AXIS Object Analytics。
开始该应用程序,然后单击打开。
选择要修改的方案,然后单击打开。
转到对象速度并启用使用速度触发。
将速度范围设置为打开触发。
如果要在高于及低于设定范围的速度下触发,请单击反转。
选择侦测灵敏度
通过选择侦测灵敏度的选项,您可以决定是要触发视频或雷达进行侦测,还是同时触发两者进行侦测。您也可以让设备本身,基于融合算法,决定它是应该依赖其中一种技术,还是同时依赖这两种技术。
此选项在区域中的对象和线交叉 方案中可用。
转到应用 > AXIS Object Analytics。
开始该应用程序,然后单击打开。
选择要修改的方案,然后单击打开。
转到侦测灵敏度,然后选择以下选项之一:
低灵敏度:同时需要雷达和摄像机来侦测目标。这降低了误报的风险,但增加了遗漏侦测的风险。
为了确保两种技术都能侦测到物体,场景不能太复杂。光线条件需要良好,侦测区域需要在两种技术的侦测范围内,并且理想条件是不存在干扰因素,例如树木或灌木。
自动:让应用决定是否需要雷达和摄像机,或者只需要其中一个来侦测对象。这是默认选项。
高灵敏度:需要雷达或摄像机来侦测目标。这增加了误报的风险,但减少了遗漏侦测的风险。
当您选择高灵敏度时,照明条件和侦测区域的大小就不那么重要了,因为您只需要其中一种技术来侦测对象。
您可以使用自动校准功能提高 AXIS Object Analytics 检测到的对象周围显示的边界框的精度。自动校准不会影响检测,只会影响边界框的可视化。
有关详细信息,请参见 自动校准设备。
大幅度减少假警报
如果发现自己收到太多假警报,则可过滤某些类型的移动或物体、更改范围,或调整侦测灵敏度。查看哪些设置更适用于您的环境。
调整 AXIS Object Analytics 的侦测灵敏度:
转到应用 > AXIS Object Analytics,打开一个场景,然后选择一个较低的侦测灵敏度。
低灵敏度:同时需要雷达和摄像机来侦测目标。减少了假警报风险,但增加了遗漏侦测的风险。
自动:让应用决定是否同时需要雷达和摄像机或者只需要其中一个来侦测目标。
高灵敏度:需要雷达或摄像机来侦测目标。增加了假警报风险,但减少了遗漏侦测的风险。
调整雷达的侦测灵敏度:
转到雷达 > 设置 > 侦测,并选择较低的侦测灵敏度。这会减少假警报的风险,但也可能导致雷达无法捕捉到某些移动。
低:当区域中存在大量金属物体或大型车辆时,请使用此灵敏度。这将花费更长的时间来跟踪和对物体进行分类。这可能会降低侦测范围,尤其是快速移动物体。
中:这是默认设置。
高:在雷达前面有一个无金属物体的开阔场地时,请使用这种灵敏度。这将增加人的侦测范围。
修改方案并排除区域:
如果场景包括硬表面(如金属壁),则可能会存在导致对单个实体物体进行多次侦测的反射。您可以修改场景的形状,或添加忽略场景特定部分的排除区域。有关详细信息,请参见添加场景和添加排除区域。
在目标跨越两条线(而非一条线)时触发:
如果越线场景中包括摆动的物体或走动的动物,则存在物体越线并触发假警报的风险。在这种情况下,您可以将场景配置为仅在物体跨越两条线时触发。有关详细信息,请参见 添加场景。
移动过滤:
转到雷达 > 设置 > 侦测,然后选择忽略摆动的物体。该设置可尽量降低因覆盖区域内树木、灌木丛和旗杆引起的假警报的发生。
转到雷达 > 设置 > 侦测,然后选择忽略摆动的小型物体。该设置可尽量降低因覆盖范围内小型物体(如猫和兔子)引起的假警报的发生。
时间过滤:
转到雷达 > 场景。
选择一个场景,然后单击修改其设置。
在触发前秒数下选择一个较高的值。这是从雷达开始跟踪某个物体到其触发警报之间的延迟时间。当雷达首次侦测到物体时计时器开始计时(并非从物体进入场景中的指定区域时开始)。
按对象类型过滤:
转到雷达 > 场景。
选择一个场景,然后单击修改其设置。
要避免触发特定的物体类型,取消选择不会触发该场景事件的物体类型。
- 注意
该目标类型设置仅影响雷达。其将被 AXIS Object Analytics 忽略。
设置事件规则
了解更多信息,请参见开始使用事件规则。
在未侦测到运动时省电
本示例解释了如何在场景中未检测到运动时打开节电模式。
当打开节能模式时,红外照明范围将会降低。
- 请确保 AXIS Object Analytics 正在运行:
转到应用 > AXIS Object Analytics。
如果应用程序尚未运行,请将其启动。
请确保已根据需要设置了应用程序。
- 创建一个规则:
转到系统 > 事件并添加响应规则。
为规则键入一个名称。
在条件列表中的应用下,在应用程序下,选择 Object Analytics。
选择反转此条件。
在操作列表中的节能模式下,选择规则处于活动状态时使用节能模式。
单击 Save(保存)。
打开外壳时触发通知
本示例说明如何设置设备护罩或外壳打开时的电子邮件通知。
- 添加电子邮件接受者:
转到系统 > 事件 > 接受者并单击添加接受者。
键入接受者的名称。
选择 Email(电子邮件)作为通知类型。
输入接收者的电子邮件地址。
输入您想让摄像机发送通知的电子邮件地址。
提供发送电子邮件账户的登录信息以及 SMTP 主机名和端口号。
要测试电子邮件设置,请单击 Test(测试)。
单击 Save(保存)。
- 创建一个规则:
转到系统 > 事件 > 规则并单击添加规则。
为规则键入一个名称。
在条件列表中,选择外壳打开。
在响应列表中,选择发送电子邮件通知。
从列表中选择接受人。
键入电子邮件的主题行和消息。
单击 Save(保存)。
如果有人用金属物体覆盖雷达,请发送电子邮件
此示例说明如何创建一个规则,该规则在有人用金属物体(如金属箔或金属板)覆盖雷达以篡改雷达时发送电子邮件通知。
- 添加电子邮件接受者:
转到系统 > 事件 > 接受者,然后添加一个接受者。
键入接受者的名称。
在类型下 ,选择电子邮件。
键入要向其发送电子邮件的电子邮件地址。
根据您的电子邮件提供商填写其余信息。
雷达设备没有自己的电子邮件服务器,因此需要登录到一个电子邮件服务器才能发送电子邮件。
要发送测试电子邮件,单击测试。
单击 Save(保存)。
- 创建一个规则:
转到系统 > 事件并添加响应规则。
键入规则的名称,例如
Tampering mail。从条件列表中的设备状态下,选择雷达数据故障。
在原因下,选择 篡改。
在操作列表中,在通知下,选择将通知发送到电子邮件。
选择您创建的收件人。
键入电子邮件的主题和消息。
单击 Save(保存)。
使用雷达控制 PTZ 摄像机
可以使用来自雷达的有关物体位置的信息来使 PTZ 摄像机跟踪物体。有两种方法可实现此操作:
使用内置雷达自动跟踪服务控制 PTZ 摄像机. 内置选项适用于 PTZ 摄像机和雷达安装距离很靠近时。
使用 AXIS Radar Autotracking for PTZ 控制 PTZ 摄像机. Windows 应用程序适用于要使用多个 PTZ 摄像机和雷达来跟踪物体时。
使用 NTP 服务器同步摄像机和 Windows 计算机上的时间。如果时钟不同步,则可能会出现跟踪延迟或迭影跟踪。
使用内置雷达自动跟踪服务控制 PTZ 摄像机
内置雷达自动跟踪创建了一个边缘到边缘的解决方案,其中雷达直接控制 PTZ 摄像机。其支持全部 Axis PTZ 摄像机。
您可以使用内置雷达自动跟踪服务将一个雷达与一台 PTZ 摄像机连接起来。对于想要使用多个雷达或 PTZ 摄像机的设置,请使用 AXIS Radar Autotracking for PTZ。有关详细信息,请参见使用 AXIS Radar Autotracking for PTZ 控制 PTZ 摄像机。
本说明解释了如何将雷达与 PTZ 摄像机配对、如何校准设备以及如何设置物体跟踪。
在您开始之前:
通过在雷达中设置排除区域来定义关注区域,避免不必要的报警。确保排除有雷达反射材料或摆动物体(如树叶)的区域,以防止PTZ摄像机跟踪无关物体。有关说明,请参见添加排除区域。
- 将雷达与 PTZ 摄像机配对:
转到系统 > 边缘到边缘 >PTZ 配对。
输入 PTZ 摄像机的 IP 地址、用户名和密码。
单击 Connect(连接)。
单击配置雷达自动跟踪或转到雷达 > 雷达 PTZ 自动跟踪设置雷达自动跟踪。
- 校准雷达和 PTZ 摄像机:
转到雷达 > 雷达 PTZ 自动跟踪。
要设置摄像机的安装高度,转到摄像机安装高度。
要水平转动 PTZ 摄像机,使其指向与雷达相同的方向,转到平移对齐。
如果需要调整倾斜以补偿倾斜的地面,转到地面倾斜偏移,然后添加以度为单位的偏移量。
- 设置 PTZ 跟踪:
转到跟踪以选择是否要跟踪人员、车辆和/或未知物体。
要开始使用 PTZ 摄像机跟踪物体,打开跟踪。
追踪将自动聚焦一个或一组目标,以让它们保持在摄像机的画面中。
如果预计有多个物体无法在摄像机视图中显示,请打开物体切换。
使用此设置后,雷达会优先选择要跟踪的物体。
要确定跟踪每个物体的秒数,请设置物体保持时间。
要在雷达不再跟踪物体时让 PTZ 摄像机返回到其初始位,打开返回到初始位。
要确定 PTZ 摄像机在返回到初始位前应在所跟踪物体最后已知位置停留的时间,请设置返回到初始位超时。
要微调 PTZ 摄像机的变焦,请调整滑块上的变焦。
使用 AXIS Radar Autotracking for PTZ 控制 PTZ 摄像机
AXIS Radar Autotracking for PTZ 是一款基于服务器的解决方案,可以在跟踪目标时处理不同的设置:
使用一个雷达控制多个 PTZ 摄像机。
控制具有多个雷达的 PTZ 摄像机。
控制具有多个雷达的多个 PTZ 摄像机。
当安装在覆盖相同区域的不同位置时,使用一台雷达控制一个 PTZ 摄像机。
该应用与一组特定的 PTZ 摄像机兼容。有关更多信息,请参见 axis.com/products/axis-radar-autotracking-for-ptz#compatible-products。
下载应用,参阅用户手册了解如何设置应用。有关更多信息,请参见 axis.com/products/axis-radar-autotracking-for-ptz/support。
使用 MQTT 发送雷达数据
使用带有应用 AXIS Speed Monitor 的雷达-视频合成摄像机收集侦测到的物体的雷达数据,并将其通过 MQTT 发送。
本示例解释了如何在已安装 AXIS Speed Monitor 的设备中设置 MQTT 客户端,以及如何创建一个条件,将 AXIS Speed Monitor 收集的雷达数据作为有效负载发布到 MQTT 中介。
- 在您开始之前:
在雷达-视频合成摄像机中安装 AXIS Speed Monitor,或将其安装在雷达-视频合成摄像机中连接到雷达的摄像机中。
更多信息,请参见 AXIS Speed Monitor 用户手册。
设置 MQTT 代理并获取代理的 IP 地址、用户名和密码。
在 AXIS OS Knowledge Base 中了解有关 MQTT 和 MQTT 代理的更多信息。
- 在已安装 AXIS Speed Monitor 的设备的网络界面中设置 MQTT 客户端:
转到系统 > MQTT > MQTT 客户端 > 代理,然后输入以下信息:
主机:该代理 IP 地址
Client ID(客户端ID):设备的ID
协议:代理设置为的协议
端口:代理使用的端口号
代理用户名和密码
单击保存并连接。
- 创建一个将雷达数据作为负载发布到 MQTT 代理的条件:
转到系统 > MQTT > MQTT 发布,然后单击 + 添加条件 。
在条件列表中的应用下,在应用下,选择Speed Monitor: Track exited zone(速度监控:跟踪出口区域)。
该设备现在能够为退出方案的每个移动物体发送雷达轨道的相关信息。每个物体都会有自己的雷达跟踪参数,例如rmd_zone_name、tracking_id以及trigger_count。您可以在AXIS Speed Monitor用户手册中找到完整的参数列表。
当摄像机侦测到目标时录制视频
本示例解释了如何设置摄像机,当摄像机侦测到目标时开始录制到 SD 卡。该录制内容将包括侦测前 5 秒到侦测结束后一分钟之间的画面。
在您开始之前:
请确保您已安装 SD 卡。
- 请确保 AXIS Object Analytics 正在运行:
转到应用 > AXIS Object Analytics。
如果应用程序尚未运行,请将其启动。
请确保已根据需要设置了应用程序。
- 创建一个规则:
转到系统 > 事件并添加响应规则。
为规则键入一个名称。
在条件列表中的应用下,在应用程序下,选择 Object Analytics。
在操作列表中,在录制下,选择在规则处于活动状态时录制视频。
存储选项列表中,选择 SD_DISK。
请选择一个摄像机和一个流配置文件。
将预缓冲时间设置为 5 秒。
将后缓冲时间设置为1 分钟。
单击 Save(保存)。
为正在发生的事件提供视觉指示
您可以选择将 AXIS I/O Indication LED 连接到网络摄像机。此 LED 可以配置为当摄像机中发生某些事件时即打开。例如,让人们知道正在进行视频录制。
所需硬件
AXIS I/O Indication LED
一台 Axis 网络视频摄像机
- 注意
有关如何连接 AXIS I/O Indication LED 的说明,请参见产品随付的安装指南。
以下示例显示了如何配置打开 AXIS I/O Indication LED 来指示摄像机正在进行录制的规则。
转到系统 > 附件 > I/O 端口。
对于您连接到AXIS I/O Indication LED的端口,单击将方向设置为Output(输出),然后单击将正常状态设置为Circuit open(开路)。
转到系统 > 事件。
创建新规则。
选择触发摄像机开始录制必须满足的条件。例如,可以是时间表或移动侦测。
在操作列表中,选择录制视频。选择存储空间。选择流配置文件或创建新配置文件。并根据需要设置预缓冲和后缓冲。
保存规则。
创建另一个规则,选择与首个规则相同的条件。
在操作列表中,选择当规则处于活动状态时切换 I/O,然后选择与 AXIS I/O Indication LED 连接的端口。将状态设置为激活。
保存规则。
- 可以使用 AXIS I/O Indication LED 的其他场景如:
将 LED 配置为在摄像机启动时打开,来指示摄像机状态。选择系统就绪作为条件。
将 LED 配置为在直播流处于活动状态时打开,来指示有人或程序正在访问摄像机中的流。选择实时流访问作为条件。
当设备侦测到目标时,显示视频流中的文本叠加
本示例说明了当设备侦测到目标时,如何显示文本“Motion detected”。
- 请确保 AXIS Object Analytics 正在运行:
转到应用 > AXIS Object Analytics。
如果应用程序尚未运行,请将其启动。
请确保已根据需要设置了应用程序。
- 添加叠加文本:
转到视频 > 叠加。
在Overlays(叠加)下,选择Text(文本),然后单击。
在文本字段中,输入
#D。选择文本大小和外观。
要对文本叠加进行定位,请单击并选择一个选项。
- 创建一个规则:
转到系统 > 事件并添加响应规则。
为规则键入一个名称。
在条件列表中的应用下,在应用程序下,选择 Object Analytics。
在操作列表中,在叠加文本下,选择使用叠加文本。
选择视频通道。
在文本中 ,键入“已侦测到移动动作”。
设置持续时间。
单击 Save(保存)。
如果您更新叠加文本,它将在视频流上动态自动更新。
当 PIR 侦测器侦测到运动时录制视频
本示例解释了如何将 PIR 侦测器(常闭)连接到设备,以及如何在侦测器侦测到运动时开始录制视频。
- 所需硬件
3 线电缆(接地、电源、I/O)
PIR 侦测器,常闭
连接电线前,请断开设备电源。在完成连接后,重新连接到电源。
- 将电线连接到设备的 I/O 连接器
- 注意
请参见 连接器 以了解有关 I/O 连接器销的信息。
将地面电缆连接至引脚 1(接地/-)。
将电源线连接至引脚 2(12V DC 输出)。
将 i/o 线连接至引脚 3(I/O 输入)。
- 将电线连接到 PIR 侦测器的 I/O 连接器
将地面电缆的另一端连接到引脚 1(接地/-)。
将电源线的另一端连接到引脚 2(DC 输入/+)。
将 i/o 线的另一端连接到引脚 3(I/O 输出)。
在设备网页界面中配置 I/O 端口
转到系统 > 附件 > I/O 端口。
单击以将端口 1 的方向设置为输入。
为输入模块提供一个描述性名称,例如,“PIR 侦测器”。
如果要在 PIR 侦测器侦测到运动时触发事件,请单击将正常状态设置为“闭路”。
- 创建规则
转到系统 > 事件并添加响应规则。
为规则键入一个名称。
在条件列表中,选择 PIR 侦测器。
在操作列表中,在录制下,选择在规则处于活动状态时录制视频。
存储选项列表中,选择 SD_DISK。
请选择一个摄像机和一个流配置文件。
将预缓冲时间设置为 5 秒。
将后缓冲时间设置为1 分钟。
单击 Save(保存)。
当摄像机侦测到大的噪音时录制视频
本示例解释了如何将摄像机设置为在侦测到大的噪音前五秒开始录制并在两分钟后停止。
以下说明要求麦克风已连接至音频输入。
- 打开音频:
设置流配置以包括音频,请参见向录像添加音频。
- 打开音频侦测:
转到系统 > 侦测器 > 音频侦测。
根据您的需求调整声音级别。
- 创建一个规则:
转到系统 > 事件并添加响应规则。
为规则键入一个名称。
在条件列表中的音频下,选择音频侦测。
在操作列表中,在录像下,选择 录制视频。
存储选项列表中,选择 SD_DISK。
选择音频已打开的流配置文件。
将预缓冲时间设置为 5 秒。
将后缓冲时间设置为 2 分钟。
单击 Save(保存)。
侦测输入信号遮挡
本示例说明了如何在输入信号被剪切或短路时发送电子邮件。有关 I/O 连接器的详细信息,请参见 I/O 连接器。
转到System(系统)> Accessories(附件)> I/O ports(I/O端口)并为相关端口开启Supervised(受监控)。
- 添加电子邮件接受者:
转到系统 > 事件 > 接受者,然后添加一个接受者。
键入接受者的名称。
选择 Email(电子邮件)作为通知类型。
输入接收者的电子邮件地址。
输入您想让摄像机发送通知的电子邮件地址。
提供发送电子邮件账户的登录信息以及 SMTP 主机名和端口号。
要测试电子邮件设置,请单击 Test(测试)。
单击 Save(保存)。
- 创建一个规则:
转到系统 > 事件 > 规则,然后添加一个规则。
为规则键入一个名称。
在条件列表中,在 I/O下,选择受监督的输入篡改处于活动状态。
选择相关端口。
在操作列表中,在通知下,选择送电子邮件通知,然后从列表中选择接受者。
键入电子邮件的主题行和消息。
单击 Save(保存)。
音频
向录像添加音频
- 打开音频:
转到视频 > 流 > 音频,并包含音频。
如果设备有多个输入源,在源中选择正确的源。
转到音频 > 设备设置,然后打开正确的输入源。
- 编辑用于录制的流配置文件:
转到系统 > 流配置文件,然后选择流配置文件。
选择包含音频,然后将其打开。
单击 Save(保存)。
连接至闪光警报器
通过网络配对,您能够将摄像机与具备灯光和警报功能的兼容安讯士设备进行配对。配对完成后,摄像机即可对两台设备都进行配置和维护。
- 将摄像机与闪光警报器配对:
转到系统 > 边缘到边缘 > 配对。
单击 Add(添加),然后从下拉列表中选择配对类型 Network pairing(网络配对)。
输入闪光警报器的 IP 地址、用户名和密码。
单击 Connect(连接)。显示确认消息。
要在网络上直接查找设备,请单击 Discover devices(发现设备)。
- 列表显示找到的全部安讯士设备,而不仅仅是可以配对的设备。
- 已配对的设备会显示信息图标。将鼠标悬停在图标上,可获得与已激活的配对有关的信息。
- 确认配对设备运行相同版本的 AXIS OS。
- 仅能发现已启用 Bonjour 的设备。要为设备启用 Bonjour,请打开设备的网页界面,进入 System(系统)> Network(网络)> Network discovery protocols(网络发现协议)。
网页界面
要了解配备 AXIS OS 的设备网页界面中所有可用功能和设置,转到 AXIS OS 网页界面帮助。
了解更多
远距离连接
- 该产品支持通过媒体转换器进行光纤电缆安装。光纤电缆安装提供了许多优点,例如:
远距离连接
高速
长寿命
大容量数据传输
抗电磁干扰
请在 axis.com/learning/white-papers 查找有关光纤电缆安装的更多信息,即远距离监控(网络视频中为光纤通信)。
有关如何安装媒体转换器的信息,请参见本产品的《安装指南》。
取景模式
取景模式是一种预设配置,用于定义摄像机取景的方式。
取景模式设置用于定义设备输出的分辨率上限和帧速上限。
分辨率低于上限的取景模式会缩小视野。
取景模式也会影响快门速度,进而影响感光性。这是因为达到高帧速上限的取景模式感光性会降低,反之亦然。
某些取景模式无法使用 WDR。
较低分辨率的取景模式可根据原始分辨率进行采样,也可从原始分辨率中裁掉,在此情况下,视野可能也会受到影响。
选择何种取景模式取决于特定监控设置的帧速和分辨率要求。有关可用取景模式的规格,请参见 axis.com 的产品数据表。
远程对焦和变焦
借助远程对焦和变焦功能,您可以从电脑对摄像机进行对焦和调整。这种方式可方便地用于确保场景对焦、视角和分辨率的优化,而无需去摄像机的安装现场。
隐私遮罩
隐私遮罩是覆盖部分监视区域的用户定义区域。在视频流中,隐私遮罩显示为纯色块或使用马赛克图案。
您将在快照、录制的视频和实时流上看到隐私遮罩。
您可以使用 VAPIX® 应用程序编程接口(API)来隐蔽隐私遮罩。
如果使用多个隐私遮罩,可能会影响产品的性能。
您可以创建多个隐私遮罩。每个遮罩可包含 3-10 个锚点。
叠加
叠加是指叠印在视频流上。叠加用于在录制期间或产品安装和配置期间提供额外信息(如时间戳)。您可以添加文本或图像。
视频流指示器是另一种类型的叠加。它显示实时视野视频流是实时的。
当连接通过 PoE 3 类供电时,除 SIP 通话外,全部视频流均包含叠加层。
流传输和存储
视频压缩格式
决定使用何种压缩方式取决于您的查看要求及网络属性。可用选项包括:
Motion JPEG
为了确保支持 Opus 音频编解码器,始终通过 RTP 发送 Motion JPEG 流。
Motion JPEG 或 MJPEG 是由一系列单张 JPEG 图像组成的数字视频序列。然后将按照足以创建流的速度显示和更新这些图像,从而连续显示更新的运动。为了让浏览者感知运动视频,速度必须至少为每秒 16 个图像帧。每秒 30 (NTSC) 或 25 (PAL) 帧时即可感知完整运动视频。
Motion JPEG流使用大量带宽,但可以提供出色的图像质量并访问流中包含的每个图像。
H.264 或 MPEG-4 Part 10/AVC
H.264 是一种许可制技术。Axis 产品包括一个 H.264 查看客户端牌照。禁止安装其他未经许可的客户端副本。要购买其他许可证,请与您的 Axis 分销商联系。
与 Motion JPEG 格式相比,H.264 可在不影响图像质量的情况下将数字视频文件的大小减少 80% 以上;而与旧的 MPEG 格式相比,可减少多达 50%。这意味着视频文件需要更少的网络带宽和存储空间。或者,从另一个角度来看,在给定的比特率下,能够实现更高的视频质量。
H.265 或 MPEG-H Part 2/HEVC
与 H.264 标准相比,H.265 可将数字视频文件的大小减少 25% 以上。
- H.265 是一种许可制技术。Axis 产品包括一个 H.265 查看客户端牌照。禁止安装其他未经许可的客户端副本。要购买其他许可证,请与您的 Axis 分销商联系。
- 大多数网页浏览器不支持 H.265 的解码,因此这款摄像机在其网页界面中不支持这种情况。相反,您可以使用支持 H.265 解码的视频管理系统或应用程序。
图像、流和流配置文件设置之间的关系如何?
图像选项卡包含影响来自产品的视频流的摄像机设置。如果您在此选项卡中进行了更改,它将影响视频流和录制内容。
流选项卡包含视频流的设置。如果您从产品请求视频流,但未指定示例分辨率或帧率,则可获得这些设置。当您更改流选项卡中的设置时,它不会影响正在进行的流,但它将在开始新流时生效。
流配置文件设置将重写流选项卡中的设置。如果您请求具有特定流配置文件的流,则流包含该配置文件的设置。如果您在未指定流配置文件的情况下请求流,或请求流配置文件在产品中不存在,则流将包含流选项卡中的设置。
比特率控制
比特率控制帮助您管理视频流的带宽消耗。
可变比特率 (VBR)
可变比特率允许带宽消耗根据场景中的活动水平而变化。活动越多,需要的带宽就越大。借助可变比特率,您可保证图像质量恒定,但需要确保具有存储容量。
最大比特率 (MBR)
上限比特率让您可设置一个目标比特率,以处理系统中的比特率限制。当即时比特率保持低于指定目标比特率时,您可能会看到图像质量或帧速下降。您可以选择确定图像质量或帧速的优先顺序。我们建议将目标比特率配置为比预期比特率更高的值。这样可在场景中存在高水平的活动时提供边界。
- 目标比特率
平均比特率 (ABR)
根据平均比特率,比特率可通过更长的时间段自动调整。由此,您就可以满足指定目标,并根据可用存储提供更佳视频质量。与静态场景相比,比特率在具有大量活动的场景中更高。在有大量活动的场景中,如果您使用平均比特率选项,那么您更有可能获得更高的图像质量。当调整图像质量以满足指定的目标比特率时,您可以定义存储视频流所需的总存储量(保留时间)。以下列方式之一指定平均比特率设置:
要计算预计存储需求,请设置目标比特率和保留时间。
使用目标比特率计算器,根据可用存储和所需的保留时间计算平均比特率。
- 目标比特率
- 实际平均比特率
- 您也可打开最大比特率,并在平均比特率选项中指定目标比特率。
- 目标比特率
- 实际平均比特率
边缘到边缘技术
从边缘到边缘是一种使 IP 设备直接相互通信的技术。例如,Axis 摄像机和 Axis 音频或雷达产品等之间提供了智能配对功能。
确认配对设备运行相同版本的 AXIS OS。
如需了解更多信息,请参阅白皮书“边缘到边缘技术”(网址:whitepapers.axis.com/edge-to-edge-technology)。
扬声器配对
边缘到边缘扬声器配对,可使您能够使用兼容的 Axis 网络扬声器,就如同它是摄像机的一部分。配对后,扬声器的功能将集成到摄像机的网页界面中,网络扬声器可用作音频输出设备,您可以在其中播放音频剪辑并通过摄像机传输声音。
摄像机会向 VMS 识别自己为具有集成音频输出的摄像机,并将所播放的音频重定向到扬声器。
网络配对
借助端到端网络配对功能,您可将摄像机与具备声光警示灯或补光灯功能的兼容安讯士设备建立连接,连接后即可使用配套设备内置全部功能。
分析与应用
借助分析与应用,您可以更充分地利用您的 Axis 设备。AXIS Camera Application Platform (ACAP) 是一个开放平台,使第三方能够为 Axis 设备开发分析及其他应用。应用可以预装在设备上,可以免费下载,或收取许可费。
要查找 Axis 分析与应用的用户手册,请转到 help.axis.com。
- 可同时运行多个应用,但某些应用可能无法彼此兼容。在并行运行时,某些应用组合可能需要很高的处理能力或很多内存资源。在部署之前验证应用程序能否协同工作。
AXIS Object Analytics
AXIS Object Analytics 是摄像机上预装的分析应用程序。它侦测场景中移动的目标,并将其分类为人或车辆等。您可以设置该应用程序,以发送不同类型的目标的警报。要了解有关应用程序如何工作的更多信息,请参见AXIS Object Analytics 用户手册。
AXIS Image Health Analytics
AXIS Image Health Analytics 是一款基于 AI 的应用程序,可用于侦测图像质量下降或篡改企图。该应用程序会分析并学习场景的行为,以侦测图像中的模糊处或曝光不足,或侦测受阻或重定向的画面。您可以设置该应用程序以发送侦测到的各种事件,并通过摄像机的事件系统或第三方软件触发报警动作。
要了解有关应用程序如何运作的更多信息,请参见 AXIS Image Health Analytics 用户手册。
元数据可视化
分析元数据可用于场景中的移动对象。所支持的对象类通过对象周围的边界框在视频流中可视化,以及有关对象类型和分类置信度的信息。要了解有关如何配置和使用分析元数据的更多信息,请参见 AXIS Scene Metadata 集成指南。
规格
产品概述
- 风雨罩
- 窗片
- 雷达
- 光传感器
- LED 红外照明
- 光学单元
- 电缆盖板
- 入侵报警传感器
- 安全线
- 入侵警报磁铁
请勿使用电缆盖板提起该产品。
- I/O 连接器
- RS485/422 连接器
- 电源连接器
- 网络连接器 (PoE)
- microSD 卡插槽
- 音频输出
- 音频输入
- 状态LED
- 控制按钮
- 线缆垫圈 M20(2 个)
LED 指示灯
- LED 状态指示灯可被配置为在事件激活时闪烁。
- 当您关闭外壳时 LED 将关闭。
| 状态LED | 指示 |
| 熄灭 | 连接和正常工作。 |
| 绿色 | 启动完成后,将稳定显示绿色 10 秒,以表示正常工作。 |
| 淡黄色 | 在启动期间稳定。在设备软件升级过程中或重置为出厂默认设置时闪烁。 |
| 橙色/红色 | 如果网络连接不可用或丢失,则呈橙色/红色闪烁。 |
| 红色 | 设备软件升级失败。 |
蜂鸣器
对焦助手的蜂鸣器信号
仅对可选的 P 光圈、DC 光圈或手动光圈镜头有效。
| 蜂鸣器 | 镜头 |
|---|---|
| 快速间隔 | 调整优化 |
| 中等间隔 | 调整并非优化 |
| 慢速间隔 | 调整不佳 |
SD 卡插槽
本设备支持 microSD/microSDHC/microSDXC 卡。
有关 SD 卡的建议,请参见 axis.com。
![]()
![]()
![]() microSD、microSDHC 和 microSDXC 徽标是 SD-3C LLC 的商标。microSD、microSDHC、microSDXC 是 SD-3C, LLC 在美国和/或其他国家/地区的商标或注册商标。
microSD、microSDHC 和 microSDXC 徽标是 SD-3C LLC 的商标。microSD、microSDHC、microSDXC 是 SD-3C, LLC 在美国和/或其他国家/地区的商标或注册商标。
按钮
控制按钮
- 控制按钮用于:
将产品重置为出厂默认设置。请参见 重置为出厂默认设置。
通过互联网连接到一键云连接 (O3C) 服务。若要连接,请按下并松开按钮,然后等待 LED 状态灯闪烁三次绿灯。
入侵报警开关
使用入侵警报开关可以在有人打开设备护罩时收到通知。创建一个规则,让设备在激活交换机时执行操作。请参见 打开外壳时触发通知。
连接器
网络连接器
采用以太网供电 增强版 (PoE+) 的 RJ45 以太网连接器。
音频连接器
音频输入 – 3.5 毫米输入,用于单声道麦克风或线路输入单声道信号(左声道用于立体声信号)。
音频输入 – 3.5 毫米输入,用于数字麦克风、模拟单声道麦克风或线路输入单声道信号(左声道用于立体声信号)。
音频输出 – 用于音频(线路级)的 3.5 毫米输出,可连接到公共地址 (PA) 系统或带有内置放大器的有源扬声器。立体声连接器必须用于音频输出。
音频输入
| 1 尖部 | 2 中间环 | 3 尾段 |
非平衡麦克风(带/不带电子电源)或线路输入 | 可选择电子电源 | 接地 |
平衡麦克风(带/不带幻象电源)或线路输入,“热”信号 | 平衡麦克风(带/不带幻象电源)或线路输入,“冷”信号 | 接地 |
数字信号 | 可选择环形电源 | 接地 |
音频输出
| 1 尖部 | 2 中间环 | 3 尾段 |
通路 1,非平衡线路,单声道 | 通路 1,非平衡线路,单声道 | 接地 |
I/O 连接器
使用 I/O 连接器连接外部设备,并结合应用移动侦测、事件触发和报警通知等功能。除 0 VDC 参考点和电源(12 V DC 输出)外,I/O 连接器还提供连接至以下模块的接口:
- 数字输入
- 用于连接可在开路和闭路之间切换的设备,例如 PIR 传感器、门/窗磁和玻璃破碎侦测器。
- 监控输入
- 能够侦测对数字输入进行的篡改。
- 数字输出
- 用于连接继电器和 LED 等外部设备。已连接的设备可由 VAPIX® 应用程序编程接口、通过事件或从设备网页接口进行激活。
6 针接线端子
| 功能 | 针脚 | 注意 | 规格 |
| DC 接地 | 1 | 0 VDC | |
| DC 输出 | 2 | 可用于为辅助设备供电。 | 12 VDC 最大负载 = 50 mA |
| 可配置(输入或输出) | 3–6 | 数字输入或监控输入 – 连接至针脚 1 以启用,或保留浮动状态(断开连接)以停用。要使用监控输入,则安装线尾电阻器。有关如何连接电阻器的信息,请参见连接图。 | 0 至最大 30 VDC |
| 数字输出 – 启用时内部连接至针脚 1(DC 接地),停用时保留浮动状态(断开连接)。如果与电感负载(如继电器)一起使用,则将二极管与负载并联连接,以防止电压瞬变。 | 0 至最大 30 VDC,开漏,100 mA |
示例
- DC 接地
- DC 输出 12 V,最大 50 mA
- I/O 配置为监控输入
- I/O 配置为输出
- 可配置的 I/O
- 可配置的 I/O
电源连接器
用于 DC 电源输入的双针接线端子。使用额定输出功率限制为≤100 W或额定输出电流限制为≤5 A且符合安全超低电压 (SELV) 要求的限制电源 (LPS)
RS485/RS422 连接器
两个 2 针接线端子,用于 RS485/RS422 串行接口。
串行端口可配置为支持:
两线 RS485 半双工
四线 RS485 全双工
两线 RS422 单工
四线式 RS422 全双工点到点通信
功能 | 注意 |
RS485/RS422 TX(A) | 用于 RS422 和 4 线 RS485 的 TX 线对 |
RS485/RS422 TX(B) | |
RS485A alt RS485/422 RX(A) | 适用于不同模式的 RX 对(适用于双线 RS485 的组合 RX/TX) |
RS485B alt RS485/422 RX(B) |
故障排查
重置为出厂默认设置
![]() 本产品可能会发出有害的光辐射。可能伤害眼睛。请勿注视正在工作的灯。
本产品可能会发出有害的光辐射。可能伤害眼睛。请勿注视正在工作的灯。
重置为出厂默认设置时应谨慎。重置为出厂默认设置会将全部设置(包括 IP 地址)重置为出厂默认值。
将产品重置为出厂默认设置:
断开产品电源。
按住控制按钮,同时重新连接电源。请参见 产品概述。
按住控制按钮15–30秒,直到状态LED指示灯闪烁琥珀色。
释放控制按钮。当状态LED指示灯变绿时,此过程完成。如果网络上没有可用的DHCP服务器,设备IP地址将默认为以下之一:
使用AXIS OS 12.0及更高版本的设备: 从链路本地地址子网获取 (169.254.0.0/16)
使用AXIS OS 11.11及更早版本的设备: 192.168.0.90/24
使用安装和管理软件工具分配 IP 地址、设置密码和访问设备。
安装和管理软件工具可在 axis.com/support 的支持页上获得。
您还可以通过设备网页界面将参数重置为出厂默认设置。转到维护 > 出厂默认设置,然后单击默认。
AXIS OS 选项
Axis 可根据主动追踪或长期支持 (LTS) 追踪提供设备软件管理。处于主动追踪意味着可以持续访问新产品特性,而 LTS 追踪则提供一个定期发布主要关注漏洞修复和安保升级的固定平台。
如果您想访问新特性,或使用安讯士端到端系统产品,则建议使用主动追踪中的 AXIS OS。如果您使用第三方集成,则建议使用 LTS 追踪,其未针对主动追踪进行连续验证。使用 LTS,产品可维护网络安全,而无需引入重大功能改变或影响现有集成。如需有关安讯士设备软件策略的更多详细信息,请转到 axis.com/support/device-software。
检查当前 AXIS OS 版本
AXIS OS 决定了我们设备的功能。当您进行问题故障排查时,我们建议您从检查当前 AXIS OS 版本开始。新版本可能包含能修复您的某个特定问题的校正。
要检查当前 AXIS OS 版本:
转到设备的网页界面 > 状态。
请参见设备信息下的 AXIS OS 版本。
升级 AXIS OS
- 升级设备软件时,您的预配置和自定义设置将被保存。安讯士公司无法保证设置会被保存,即使新版 AXIS OS 支持这些功能。
- 从 AXIS OS 12.6 开始,您必须安装设备当前版本与目标版本之间的各个 LTS 版本。例如,如果当前安装的设备软件版本为 AXIS OS 11.2,则必须先安装 LTS 版本 AXIS OS 11.11 才能将设备升级至 AXIS OS 12.6。有关更多信息,请参见:AXIS OS 生命周期指南:升级路径。
- 确保设备在整个升级过程中始终连接到电源。
- 使用活动追踪中的新 AXIS OS 升级设备时,产品将获得可用的新功能。在升级前,始终阅读每个新版本提供的升级说明和版本注释。要查找新 AXIS OS 和发布说明,请转到 axis.com/support/device-software。
将 AXIS OS 文件下载到您的计算机,该文件可从 axis.com/support/device-software 免费获取。
以管理员身份登录设备。
转到维护 > AXIS OS 升级,然后单击升级。
- 升级完成后,产品将自动重启。
技术问题和可能的解决方案
升级 AXIS OS 时出现问题
AXIS OS 升级失败 如果升级失败,该设备将重新加载以前的版本。比较常见的原因是上载了错误的 AXIS OS 文件。检查 AXIS OS 文件名是否与设备相对应,然后重试。 |
AXIS OS 升级后出现的问题 如果您在升级后遇到问题,请从维护页面回滚到之前安装的版本。 |
设置 IP 地址时出现问题
无法设置 IP 地址
|
设备访问问题
通过浏览器访问设备时无法登录 启用 HTTPS 后,需在登录时使用正确的协议(HTTP 或 HTTPS)。您可能需要在浏览器的地址字段中手动键入 如果您遗失了根帐户密码,则必须将设备重置为出厂默认设置。有关说明,请参见重置为出厂默认设置。 |
通过DHCP修改了IP地址。 从 DHCP 服务器获得的 IP 地址是动态的,可能会更改。如果 IP 地址已更改,请使用 AXIS IP Utility 或 安讯士设备管理器在网络上找到设备。使用设备型号或序列号或根据 DNS 名称(如果已配置该名称)来识别设备。 如有需要,您可以手动分配静态 IP 地址。如需说明,请转到 axis.com/support。 |
使用 IEEE 802.1X 时出现证书错误 要使身份验证正常工作,则安讯士设备中的日期和时间设置必须与 NTP 服务器同步。转到系统 > 日期和时间。 |
该浏览器不受支持 有关推荐浏览器的列表,请参阅 浏览器支持。 |
无法从外部访问设备 如需从外部访问设备,我们建议您使用以下其中一种适用于 Windows® 的应用程序:
有关说明和下载文件,请转到 axis.com/vms。 |
MQTT 问题
无法通过 SSL 通过端口 8883 进行连接,MQTT 通过 SSL 防火墙会拦截使用 8883 端口的流量,因为该端口被判定为存在安全风险。 在某些情况下,服务器/中介可能不会提供用于 MQTT 通信的特定端口。仍然可以使用通常用于 HTTP/HTTPS 通信的端口上的 MQTT。
|
如果您无法在此处找到您要寻找的信息,请尝试在 axis.com/support 上的故障排除部分查找。
| 雷达-视频合成问题 | |
边界框不能精确覆盖物体 | 如果没有视频分析侦测,摄像机将在图像中显示雷达侦测的投影,这不如视频分析边界框准确。这也可能是由于场景中的海拔差异,如斜坡道路、山丘或洼地。 如果此框太高或太低,请确保安装高度设置正确。您还可以使用自动校准功能提高边界框的精度。要使用自动校准,请转 雷达>自动校准。 |
边界框显示 1 个人,而实际上有 2 个人 | 如果两个人走得很近,并且只被雷达侦测到,他们将被归类为一个人,并且只会出现一个边界框。当它们进入分析融合区时,它们将被准确地分类。 |
边界框在跟踪物体时移动其位置 | 当雷达和摄像机分析同时侦测同一物体时,或者如果只有摄像机分析侦测物体时,将使用摄像机信息紧紧围绕物体绘制边界框。 如果视频侦测丢失,则将在雷达投影的位置绘制边界框,这不太准确。一旦再次拾取了视频侦测,将再次在正确的位置绘制边界框。 您还可以使用自动校准功能提高边界框的精度。要使用自动校准,请转 雷达>自动校准。 |
我获得的侦测距离与手册上所述的不一样 |
|
如何尽量减少假警报? |
|
雷达干扰 | 设备使用两个雷达信道中的一个。在每个信道内,多达四个雷达可以协商如何更好地使用该频率。尽管有此功能,但有时您也可能会看到关于摄像机干扰的警告信息。然后您可以为每个设备手动选择一个信道。 物理上彼此接近的设备应设置为同一信道。这可以使设备更容易避免干扰。 |
性能考虑
需要考虑的更重要的因素:
由于基础设施差而导致的网络利用率重负会影响带宽。
联系支持人员
如果您需要更多帮助,请转到 axis.com/support。
网络安全
网络安全助力确保成功的产品生命周期管理,并将风险降至最低。您可以在以下链接中查阅有关我们网络安全策略的详细信息和文档: axis.com/about-axis/cybersecurity。请遵循以下网络安全指南,以便接收安讯士发送的产品安全通知,并配置您的产品以实现安全生命周期和退役。
在 Axis Trust Center 上,您可以了解安讯士如何落实安全合规、透明度、数据保护和隐私保护的信息。
漏洞管理
安讯士是通用漏洞披露 (CVE) 编号授权机构 (CNA) 之一。为了最大限度降低您所面临的风险,在对我们设备、软件及服务中的漏洞进行识别和修复时,我们始终遵循行业标准。如需了解我们漏洞管理政策的相关信息或报告漏洞,请访问 axis.com/vulnerability-management。
安全通知
请访问 axis.com/security-notification-service 订阅安讯士安全通知电子邮件。我们将向您发送有关您所使用的安讯士产品存在的漏洞、相应的安全通告及其他安全相关事项的信息。
安全产品生命周期
安讯士通过安全生命周期管理,在产品全生命周期内将风险降至最低。请访问 help.axis.com 查阅我们的强化配置指南,以更安全地配置和操作您的安讯士产品,并了解以下信息:
- 首次使用安全
- 安讯士产品预配置高强度默认保护,以确保从一开始就能实现安全的初始化及加密通信。
- 预期用途与常见配置错误
- 我们的指南提供有关安讯士产品预期用途的信息,包括应避免的常见安全相关误用和配置错误。
- 漏洞与供应链透明度管理
- 每次软件发布时,都会在 axis.com 上发布一份软件物料清单 (SBOM),以披露漏洞并提高供应链透明度。
- 产品退役与数据安全擦除
- 当产品到达生命周期终点时,为实现安全退役,请将其恢复为出厂默认设置。这会擦除您的配置、存储数据和敏感信息。