ソリューションの概要
レーダービデオ融合カメラは、完全統合型のレーダーモジュールを搭載したビジュアルカメラです。そのため、レーダーとビデオを個別に、または組み合わせて使用して、物体を検知および分類できます。
レーダービデオ融合の利点は、より正確な検知と分類が可能になり、アラームの誤作動や見逃しが少なくなることです。2つの技術の融合は、AXIS Object Analyticsに集約されています。これは、レーダービデオ融合にアクセスして設定するための主要なインターフェースです。
AXIS Q1656-DLEは、奥行きのある広いエリアで物体を検知し分類するため、エリア監視や道路監視に使用できます。さらに、AXIS Q1656-DLEは、他の装置と組み合わせたサイト設計にも適しています。AXIS Q1656-DLEのレーダーの検知範囲がカメラの視野よりも広いため、IR照明を備えたPTZカメラと組み合わせることで、レーダーの検知範囲全体での映像による確認が可能になります。また、細長いエリアの物体を検知して分類できるサーマルカメラと組み合わせることもできます。
なぜ融合なのか
ビデオとレーダーは、それぞれ単独で使用する場合、固有の長所と短所があります。
コントラストが十分であり、物体がカメラに近づくように動いている場合、通常、ビデオの分類はより正確になります。また、レーダーよりも詳細な分類が可能です。ただし、カメラは物体を視認するために良好な照明条件が必要です。
一方、レーダーは厳しい照明条件でも物体を検知でき、その検知および分類範囲はより長くなります。天候条件に関係なく、レーダーは動く物体の速度や方向、距離を測定できます。しかし、映像による確認ができないため、レーダーによる分類は脆弱になることがあります。揺らめいている物体や反射面は誤報の原因となることがあるため、サイトの設計やレーダーの設定時に考慮する必要があります。
レーダーとビデオの融合カメラの2つの技術は、それぞれ単独でも使用できますが、両方の技術からの分析が合わされば、相乗効果が生まれ、検知と分類の信頼性が高まります。
レーダービデオ融合の説明
- 本製品はレーダーデータとビデオデータを2つの方法で融合します。
映像による融合 :レーダー検知と分類を融合してビデオ画像にします。これは、ビデオ分析が利用できない場合に、ビデオストリーム内のレーダーデータを可視化する方法です。
たとえば、50 m離れた場所に物体が現れた場合、ビデオ分析では小さすぎて検知できない可能性がありますが、レーダーでは識別できます。その場合、レーダー検知は融合されて画像平面となり、AXIS Object Analyticsの内部でアラームをトリガーするのに使用できます。
分析による融合:レーダーによる検知と分類が、ビデオ分析による検知と分類に融合されます。これにより、両方の技術のそれぞれの強みを融合した複合的な分析出力を得ることができます。この方法では、レーダーによる距離と速度、ビデオによる位置と分類が使用されます。
上の例では、物体が近づくと、ビデオ分析もそれを検知します。レーダー検知はその後にビデオ分析出力と融合されて、これらの2つの技術が個別に実現するよりも品質が高く情報量が多い出力が生成されます。
インストール
プレビューモード
プレビューモードは、設置担当者が設置中にカメラビューを微調整する際に最適です。プレビューモードでは、カメラビューにアクセスするのにログインする必要はありません。このモードは、装置の電源投入から一定時間、工場出荷時の設定状態でのみ使用できます。
インストールガイド
本製品のインストールガイドおよび他のドキュメントは、axis.com/products/axis-q1656-dle/support#support-resourcesから入手できます。
検討事項
製品の取り付け場所
ビデオとレーダーのカバー範囲を最適に保つには、製品を適切に取り付ける必要があります。レーダービデオ融合カメラを取り付けるときは、次の点を考慮してください。
エリアまたは道路の監視
本製品はオープンエリアの監視を目的としており、エリア監視にも道路監視にも使用できます。設置例や使用例については、エリア設置および道路設置を参照してください。
固形物や反射物を避ける
固体や金属はAXIS Q1656-DLEのレーダーのパフォーマンスに影響することがあります。対象範囲内のほとんどの固体 (壁、フェンス、樹木、大きな茂みなど) は、その背後に死角 (レーダーシャドウ) を作り出します。視野内の金属の物体は反射を引き起こし、レーダーの分類機能に影響します。これにより、レーダーストリームでゴースト追跡や誤報が発生することがあります。
- 実際の検知
- 反射の検知 (ゴースト追跡)
レーダーの対象範囲内の固形物と反射物の取り扱い方法については、除外範囲の追加を参照してください。
設置位置
製品を安定したポールに設置するか、壁面上で他の物体や設置された装置がない場所に設置します。製品の左右1 m以内にある物体は、電波を反射するため、AXIS Q1656-DLEのレーダーのパフォーマンスに影響します。
製品を壁に設置する場合は、15°以上の角度で壁から離れた方向を向くようにする必要があります。
また、取り付け高さはビデオとレーダーの両方の検知距離および範囲に影響します。
チルト角度
画像の中心が水平線より下になるように、製品を十分に地面に向ける必要があります。推奨される取り付け角度は15〜45°です。
レーダーのライブビューに、製品のチルト角を示すオーバーレイを追加できます。手順については、レーダーのチルト角度をテキストオーバーレイに表示するを参照してください。
ロール角度
製品のロール角度はほぼ0にしてください。画像が水平になる必要があるためです。
共存
60 GHzの周波数帯域で動作する8台を超えるレーダーまたはレーダービデオ融合カメラを互いに近くに取り付けると、互いに干渉する可能性があります。干渉を避けるには、複数のAxisレーダー装置の設置を参照してください。
複数のAxisレーダー装置の設置
共存
AXIS Q1656-DLEのレーダーの電波が検知エリアを越えて進み、最大350 m離れた他のレーダーに干渉する可能性があります。これを共存ゾーンと呼びます。
- 融合カメラ
- 検知領域
- 共存ゾーン
AXIS Q1656-DLEは、60 GHzの周波数バンドで動作します。60 GHzバンドのAxisレーダーまたはレーダービデオ融合カメラは、最大8台までは互いに近くに設置しても、向かい合わせに設置しても、問題はありません。組み込みの共存アルゴリズムにより、干渉を最小限に抑えるための適切な時間帯と周波数チャンネルを見つけることができます。
同じ周波数帯で動作するレーダー装置が8台を超えて設置されていても、それらの多くが互いに反対方向を向いている場合、干渉のリスクは低くなります。一般に、レーダー干渉によってレーダーの機能が停止することはありません。レーダーには、干渉がある場合でもレーダー信号を修復しようとする干渉軽減アルゴリズムが内蔵されています。同じ共存ゾーンに同じ周波数帯で動作するレーダーが多数ある環境では、干渉に関する警告の発生が予想されます。干渉による主な影響は、検知パフォーマンスの劣化であり、時にゴースト追跡も生じます。
レーダービデオ融合カメラは異なる周波数バンドで動作するAxisレーダーと、共存を懸念することなく組み合わせることができます。異なる周波数バンドで動作するAxisレーダー装置は互いに干渉しません。
レーダーのカバー範囲
AXIS Q1656-DLEのレーダーの水平検知領域は95°です。レーダーの検知範囲は、シーン、製品の設置の高さやチルト角度、移動物体の大きさや速度などの要因によって異なります。
検知範囲は、選択した監視プロファイルによっても異なります。AXIS Q1656-DLEはエリアまたは道路監視に使用でき、レーダーにはシナリオごとに最適化された2つのプロファイルがあります。
エリア監視プロファイル: レーダーは55 km/h (34 mph)未満の速度で移動する人、車両、不明の物体を追跡して分類します。検知範囲の詳細については、エリア検知範囲を参照してください。
道路監視プロファイル: レーダーは主に、最大200 km/h (125 mph) の速度で移動する車両を追跡して分類します。検知範囲の詳細については、道路検知範囲を参照してください。
- 注
AXIS Object Analyticsでレーダーとビデオを組み合わせると、AXIS Q1656-DLEは車両のサブクラス (バス、乗用車、バイク、トラックなど) を分類できます。
製品のwebインターフェースでエリアまたは監視プロファイルを選択します。手順については、レーダープロファイルの選択を参照してください。
カバー範囲
この装置のレーダーの水平検知領域は95°です。カバー範囲は、人の場合は2,700 m2 (29,000 ft2)、車両の場合は6,100 m2 (65600 ft2) に相当します。
製品が3.5〜7 mの高さに取り付けられている場合、最適なカバー範囲が適用されます。設置の高さは、レーダーの下の死角の大きさに影響します。
エリア検知範囲
エリア監視プロファイルは、人物の検知と追跡に最適化されていますが、車両やその他の低速で移動する物体の追跡も可能です。
最適な高さに設置した場合、検知範囲は次のとおりです。
人物の場合は5~60 m (16~200 ft)。
車両の場合は5~90 m (16~300 ft)。
- レーダーのキャリブレーションを行うときに、webインターフェースで取り付け高さを入力します。
- 検知範囲はシーンやデバイスのチルト角度によって影響されます。
- 検知範囲は動く物体のタイプとサイズによって影響されます。
レーダーの検知範囲は以下の条件下で測定されました。
範囲は地面に沿って計測されています。
物体は、身長170 cm(5 ft 7 in) の人でした。
この人はレーダーの前をまっすぐ歩いていました。
これらの値は、人が検知ゾーンに入ったときに計測されました。
レーダー感度は [Medium (中)] に設定されていました。
| 取り付け位置の高さ | チルト15° | チルト20° | チルト25° | チルト30° | チルト35° | チルト40° | チルト45° |
|---|---|---|---|---|---|---|---|
| 3.5 m (11 ft) | 6.0~60+ m (19~196+ ft) | 5.0~60+ m (16~196+ ft) | 4.0~60+ m (13~196+ ft) | 4.0~60 m (13~196 ft) | 4.0~55 m (13~180 ft) | 4.0~40 m (13~131 ft) | 4.0~30 m (13~98 ft) |
| 4.5 m (14 ft) | 6.0~60+ m (19~196+ ft) | 6.0~60+ m (19~196+ ft) | 5.0~60+ m (16~196+ ft) | 4.0~60+ m (13~96+ ft) | 4.0~60 m (13~196 ft) | 4.0~45 m (13~147 ft) | 4.0~40 m (13~131 ft) |
| 6 m (19 ft) | 10~60+ m (32~196+ ft) | 9.0~60+ m (29~196+ ft) | 7.0~60+ m (22~196+ ft) | 6.0~60+ m (19~196+ ft) | 6.0~60 m (19~196 ft) | 5.0~55 m (16~180 ft) | 5.0~55 m (16~180 ft) |
| 8 m (26 ft) | 16~60 m (52~196 ft) | 14~60 m (45~196 ft) | 10~60 m (32~196 ft) | 8.0~60+ m (26~196+ ft) | 8.0~60+ m (26~196+ ft) | 7.0~60 m (22~196 ft) | 7.0~60 m (22~196 ft) |
| 10 m (32 ft) | 21~60 m (68~196 ft) | 19~60 m (62~196 ft) | 14~60 m (45~196 ft) | 12~60+ m (39~196+ ft) | 10~60+ m (32~196+ ft) | 9.0~60 m (29~196 ft) | 9.0~60 m (29~196 ft) |
| 12 m (39 ft) | 25~60 m (82~196 ft) | 23~60 m (75~196 ft) | 19~60 m (62~196 ft) | 16~60+ m (52~196+ ft) | 13~60+ m (42~196+ ft) | 11~60 m (36~196 ft) | 11~55 m (36~180 ft) |
- レーダー感度を [Low (低)] に設定すると検知範囲は20%狭くなり、[High (高)] に設定すると検知範囲は20%広くなります。
- 設置場所で融合ゾーンの外側に小動物が現れることが予想される場合、レーダー感度を [Low (低)] に設定することで、誤報を最小限に抑えることができます。ただし、これにより検知範囲は狭くなります。
道路検知範囲
[road monitoring profile (道路監視プロファイル)] は、車両の検知用に最適化されており、最大200 km /hで走行する車両を+/- 2 km/hの速度精度で監視するために使用されます。
レーダービデオ融合カメラの取り付け高さと車両の速度はレーダーの検知範囲に影響します。取り付け高さが最適であれば、レーダーは次の範囲内で+/- 2 km/hの速度精度で近づく車両と離れる車両を検知します。
50 km/h (31 mph) で走行する車両の場合は25~100 m (82~328 ft)。
100 km/h (62 mph) で走行する車両の場合は40~80 m (131~262 ft)。
200 km/h (125 mph) で走行する車両の場合は50~70 m (164~230 ft)。
高速で走行する車両の検知漏れのリスクを最小限に抑えるには、物体タイプ [Vehicle (車両)] と [Unknown (不明)] でトリガーされるシナリオをレーダーに設定します。シナリオの設定方法の詳細については、シナリオの追加を参照してください。
レーダービデオ融合の検知範囲
両方の技術によって物体を検知および分類できる分析融合ゾーンは、次のような要因によって変わります。
カメラの取り付け高さ。
カメラのチルト角度。
カメラレンズのズームレベル。
周辺環境の照明条件、およびカメラ自体とサイトの他の装置からの光。
動く物体までの距離。
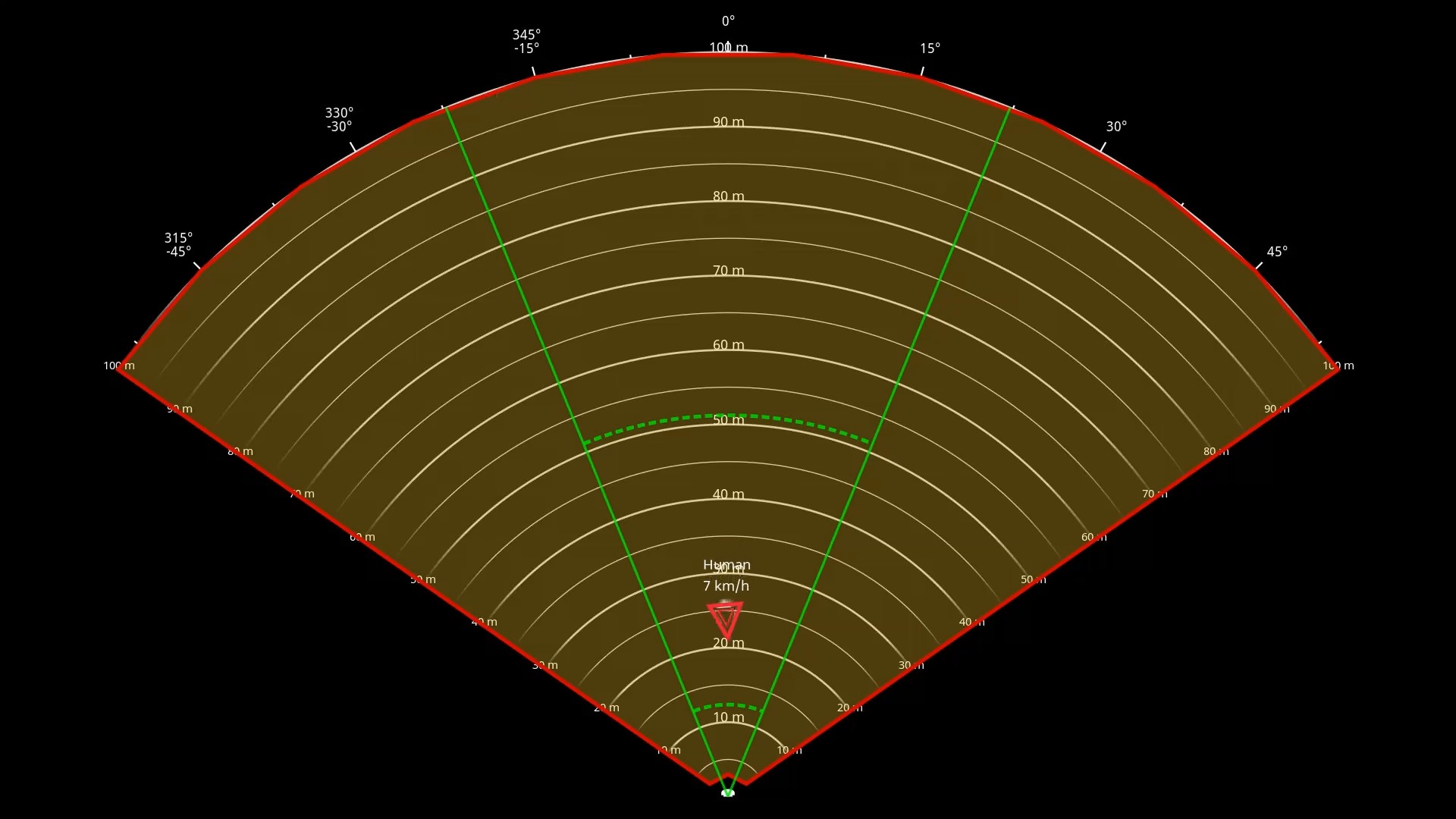
レーダービデオ融合カメラが設置されると、レーダーの検知範囲は固定されます。ただし、カメラの視野角はレンズのズームレベルによって異なります。
カメラの視野角をレーダーの検知範囲と関連付けて可視化するために、レーダーストリームには、カメラのおおよその視野を表す2本の緑色の線が表示されます。この線は、カメラがズームインまたはズームアウトすると調整されます。さらに、2本の点線は、カメラが視認できるおおよその範囲を表します。装置に近い点線は近距離検知限界を表し、より遠くの点線は遠距離検知限界を表します。
ズームレベルの例
分析融合ゾーンのサイズは、AXIS Q1656-DLEのレンズのズームレベルに影響されます。ズームレベルの2つの極値について以下に説明します。
レンズズームアウト (最大視野角)
AXIS Q1656-DLEでレンズを最大にズームアウトすると、物体が小さくなりすぎてビデオ分析で検知できないことがあります。このシナリオでは、広範囲をカバーするレーダーによって物体が検知されても、ビデオ分析機能によって検知されない可能性が高くなります。レーダーの検知範囲全体で映像による確認を行う場合、AXIS Q1656-DLEを1台以上のPTZカメラとペアリングできます。
レンズズームイン (最大望遠)
レンズを最大にズームインすると、カメラの視野角が大幅に制限されます。ただし、レンズを最大にズームアウトした場合に比べて遠くにある物体が拡大されるため、装置からはるかに離れた場所にある物体をビデオ分析で検知できるようになります。このシナリオでは、ビデオ分析で物体が検知されてもレーダー分析では検知されない可能性があります。
レーダーとビデオ分析の両方で物体が正確に分類される確率を最大限に高めるには、可能であれば、対象範囲内の物体がビデオ分析で検知できるほどの大きさになるように、ズームを調整します。
レーダービデオによる検知と分類
AXIS Q1656-DLEは、レーダーとビデオ、あるいはどちらか一方の技術を使用して物体を検知および分類できますが、いくつかの注意点があります。
2人が近くを歩いていてレーダーで検知されたがビデオ分析では検知されなかった場合、2人は1人として分類され、2人を囲む境界ボックスが1つのみ表示されます。分析融合ゾーンに入り、映像による確認ができれば、正確に分類されます。AXIS Q1656-DLEのレーダーの空間分化能力は3 m(9 ft)です。
物体がカメラの視野外にある場合、AXIS Q1656-DLEは検知や分類を画像平面に統合できません。これは、AXIS Object Analyticsがアラームをトリガーできないことを意味します。レーダーのみで物体を検知した場合にアラームがトリガーされるようにするには、レーダーのwebインターフェースでシナリオを設定し、条件を使用して、レーダーシナリオ内の動きでトリガーされるようにします。
レーダーのwebインターフェースで追加する除外ゾーンはグローバルで、これらのゾーンで検知された動きは常に無視されます。これは、除外ゾーンがAXIS Object Analyticsの分析融合ゾーンと重なっている場合でも同じです。ただし、AXIS Object Analyticsで追加した除外ゾーンでは、AXIS Object Analyticsのシナリオでのみ動きが無視されます。
エリア設置
エリア設置で最高のレーダーパフォーマンスを得るには、AXIS Q1656-DLEで [area monitoring profile (エリア監視プロファイル)] を選択します。詳細については、レーダープロファイルの選択を参照してください。
エリア設置例
たとえば、建物に沿って、または建物の周りに、仮想フェンスを作成するには、複数のレーダービデオ融合カメラを横に並べて設置できます。
レーダーが180°の範囲をカバーできるようにするには、2台のAXIS Q1656-DLEを隣り合わせに設置します。複数のレーダービデオ融合カメラを並べて設置する場合は、例に示すように、各ペアの間を100 m空けることをお勧めします。
最大8台のレーダービデオ融合カメラをレーダー間で互いに干渉することなく近接して設置できます。Axisレーダー装置を近くに配置する方法の詳細については、複数のAxisレーダー装置の設置を参照してください。
エリア監視の使用例
建物の周囲の開けた現場をカバーする
オフィスビル内のある会社は、特に勤務時間後や週末や祝日に、敷地内を侵入や破壊行為から守る必要があります。建物の周囲をカバーするために、レーダービデオ融合カメラとPTZカメラを組み合わせて設置しています。人や車両が建物に近づくとアラームがトリガーされるようにレーダービデオ融合カメラを設定しています。可能な限り信頼性の高い検知と分類を行うために、AXIS Object Analyticsでそのエリアに適した検知感度を選択しています。動体検知感度の詳細については、検知感度の選択を参照してください。
レーダーの検知範囲全体で侵入の疑いがある人を映像により確認できるようにするために、IR内蔵の2台のPTZカメラを建物の反対側の角に追加しています。レーダーはAXIS Radar Autotracking for PTZを通じてPTZカメラを操作し、内蔵IRはレーダービデオ融合カメラにより多くの光を提供するため、より遠距離にいる侵入者を検知して識別することが可能になります。
フェンスで囲まれた建物をカバーする
通常、敷地内に商品を保管する倉庫は、侵入者を防ぐためにフェンスで囲まれています。侵入の疑いがある人を検知するために、レーダービデオ融合カメラとIR内蔵のPTZカメラを組み合わせて設置し、敷地内の安全を確保しています。レーダービデオ融合カメラが信頼性の高い検知とアラームのトリガーを行い、PTZカメラが視覚的なカバー範囲を拡大します。また、IR内蔵のPTZカメラは、レーダービデオ融合カメラにより多くの光を提供するため、より遠くからの侵入者の検知と識別を行うことができます。
このシーンでは、フェンスの外側のエリアは誤報をトリガーする可能性がある混雑したエリアであるため、カバーしていません。人通りが少ないシーンでは、フェンスの外側のエリアもカバーできます。このようなシーンでは、侵入の疑いがある人を阻止するために、フェンスの外側で動きが検知されたときに外部ライトをトリガーするようにカメラを設定することが可能です。また、実際にフェンス内に侵入者が検知された場合にアラームをトリガーすることもできます。フェンスの外側での動きを検知できるようにするには、カメラを十分な高さに取り付ける必要があります。
重要な資産をカバーする
重要な機器やケーブルが設置されている通信シェルターは、侵入者を防ぐためにフェンスで囲まれています。改ざんや妨害行為を避けるために、さらなる保護が必要です。誤報を最小限に抑えることが重要であるため、サイトの対角線上に2台のレーダービデオ融合カメラを設置しました。これらのカメラは、シェルター、アンテナ、敷地全体をカバーできます。レーダービデオ融合カメラでレーダーとビデオの両方のテクノロジーを使用することで、カメラは侵入の疑いがある人を確実に検知し分類できます。
このようにレーダービデオ融合カメラを向かい合わせに設置しても、レーダー間の干渉はありません。ただし、ビデオテクノロジーにより正確な検知と分類を確実に行うには、良好な照明条件が必要です。
搬入口周辺をカバーする
商業ビルの搬入口は、敷地内を保護するためにフェンスで囲まれています。セキュリティ強化のために、同社は敷地内にサーマルカメラと3台のレーダービデオ融合カメラを設置しています。侵入の疑いがある人を検知するために、フェンスに沿ってサーマルカメラを設置しています。フェンスをすり抜けた侵入者を検知するために、レーダービデオ融合カメラを2台、搬入口に面したポールに設置しています。これらのカメラは、搬入口周辺を移動する人や車両を検知して分類でき、勤務時間後はアラームをトリガーできます。右側の旋回ポイントを通過する侵入者を検知するために、追加のレーダービデオ融合カメラをそのエリアに向けて設置しています。最後に、フェンスの近くに設置された2台のカメラに対するいたずらの試みを検知できるように、サーマルカメラを設置しています。
道路設置
道路設置で最高のレーダーパフォーマンスを得るには、AXIS Q1656-DLEで [road monitoring profile (道路監視プロファイル)] を選択します。詳細については、レーダープロファイルの選択を参照してください。
道路設置例
道路や高速道路を監視する際には、車両の後方に死角 (レーダー陰) ができないように、レーダービデオ融合カメラを十分な高さに取り付けてください。
レーダー陰の大きさは、レーダービデオ融合カメラの取り付け高さ、車両の高さ、レーダーからの距離によって異なります。たとえば、高さ4.5 mの車両が、高さ8 mに取り付けられているレーダービデオ融合カメラから50 m離れている場合、車両後方のレーダー陰は50 mになります。ただし、レーダービデオ融合カメラが高さ12 mに取り付けられている場合、同じ車両でも後方のレーダー陰は23 mにしかなりません。
サイド取り付け
道路を走行する車両を監視するには、レーダービデオ融合カメラを道路の脇、たとえばポールに取り付けることができます。このタイプの設置では、パン角度を最大25° にすることをお勧めします。
AXIS Q1656-DLEのレーダーで高速走行を正確に測定するには、レーダービデオ融合カメラを車両から横方向で10 m以内に配置します。検知範囲と速度精度の詳細については、道路検知範囲を参照してください。
センター取り付け
複数車線の道路で車両を監視するためには、道路上方のガントリーに1台以上のレーダービデオ融合カメラを取り付けることができます。
レーダーに向かってくるのではなく、レーダービデオ融合カメラから遠ざかる車両を監視する場合も、同じタイプの設置が可能です。
また、信号機のある横断歩道を見下ろすガントリーにレーダービデオ融合カメラを設置して、たとえば発進する車両の速度を記録したり、速度違反を検知したりすることもできます。
AXIS Q1656-DLEのレーダーで高速走行を正確に測定するには、レーダービデオ融合カメラを車両から横方向で10 m以内に配置します。検知範囲と速度精度の詳細については、道路検知範囲を参照してください。
道路監視の使用例
高速道路のランプでの逆走の検知
高速道路のランプで逆走車両を検知して識別するために、交通管制はランプに面したポールにAXIS Q1656-DLEを取り付けています。信頼性の高い検知を行うため、装置のwebインターフェースのレーダーページでライン横断シナリオを設定し、車両が2本のラインを横切ったときにのみアラームがトリガーされるように設定します。レーダーシナリオで、図に示すようにランプ上に2本のラインを配置し、アラームをトリガーする走行方向と速度を指定しています。この設定では、レーダーがアラームをトリガーし、カメラがランプ上の車両を映像により識別します。レーダーシナリオの設定方法の詳細については、シナリオの追加を参照してください。
交差点での交通の流れの監視 - 渋滞発生
交通量の多い交差点で渋滞がいつ、どのように発生するかを監視するために、交通管制は交差点上方のガントリーにAXIS Q1656-DLEを設置しています。AXIS Object Analyticsで範囲内の物体シナリオを設定して、範囲内を移動する車両でトリガーされるようにしています。交差点までの道路の一部のみをカバーするようにシナリオを設定し、シーンに適した検知感度を選択しています。渋滞が発生し始めたときにアラームをトリガーするために、シナリオを設定して、5 km/h未満で走行する車両でアラームがトリガーされるようにしています。AXIS Object Analyticsのシナリオを設定し、適切な検知感度を選択する方法については、AXIS Object Analyticsの設定を参照してください。
交差点での交通の流れの監視 - 方向
交通量の多い交差点での交通の流れと車両の進行方向の概要を把握するために、交通管制は交差点に向かう道路上方のガントリーにAXIS Q1656-DLEを設置しています。装置のwebインターフェースのレーダーページでライン横断シナリオを設定して、車両が2本のラインを横切ったときにのみアラームがトリガーされるようにしています。レーダーシナリオを設定する際、1本目のラインは交差点に向かう車線上、横断歩道の真後ろに配置します。これは、ライン上で停止する車両を避けるためです。2本目のラインを右側に向かう車線上に配置します。車両がアラームをトリガーするには、指定した方向の両方のラインを横切る必要があります。複数の車両が横断ごとにアラームをトリガーしないように、レーダーシナリオの最小トリガー継続時間を2秒から0秒に短縮しています。
全方向の交通の流れを監視するために、各方向に1つのレーダーシナリオを作成しています。レーダーシナリオの設定方法の詳細については、シナリオの追加を参照してください。
このレーダーシナリオでは、ラインを横切る車両はカウントされませんが、代わりに装置のwebインターフェースのイベントシステムを使用してカウントできます。車両をカウントする1つの方法として、レーダーシナリオがトリガーされるたびにMQTTメッセージを送信し、MQTT受信側でトリガーをカウントしています。
使用に当たって
ネットワーク上のデバイスを検索する
Windows®で検索したAxisデバイスにIPアドレスの割り当てを行うには、AXIS IP UtilityまたはAXIS Device Managerを使用します。いずれのアプリケーションも無料で、axis.com/supportからダウンロードできます。
IPアドレスの検索や割り当てを行う方法の詳細については、IPアドレスの割り当てとデバイスへのアクセス⽅法を参照してください。
ブラウザーサポート
以下のブラウザーでデバイスを使用できます。
ChromeTM | EdgeTM | Firefox® | Safari® | |
Windows® | ✓ | ✓ | * | * |
macOS® | ✓ | ✓ | * | * |
Linux® | ✓ | ✓ | * | * |
その他のオペレーティングシステム | * | * | * | * |
✓: 推奨:
*: 制限付きでサポート
装置のwebインターフェースを開く
ブラウザーを開き、Axis装置のIPアドレスまたはホスト名を入力します。
この装置のIPアドレスが不明な場合は、AXIS IP UtilityまたはAXIS Device Managerを使用して、ネットワーク上でこの装置を見つけてください。
ユーザー名とパスワードを入力します。装置に初めてアクセスする場合は、管理者アカウントを作成する必要があります。管理者アカウントを作成するを参照してください。
AXIS OS搭載デバイスのWebインターフェースでの全機能と設定に関する説明については、AXIS OS Webインターフェースヘルプを参照してください。
管理者アカウントを作成する
装置に初めてログインするときには、管理者アカウントを作成する必要があります。
ユーザー名を入力してください。
パスワードを入力します。安全なパスワードを参照してください。
パスワードを再入力します。
使用許諾契約書に同意します。
[Add account (アカウントを追加)] をクリックします。
装置にはデフォルトのアカウントはありません。管理者アカウントのパスワードを紛失した場合は、装置をリセットする必要があります。工場出荷時の設定にリセットするを参照してください。
安全なパスワード
ネットワーク上でパスワードやその他の機密設定を行う場合は、HTTPS (デフォルトで有効になっています) を使用してください。 HTTPSを使用すると、安全で暗号化された形でネットワークに接続できるため、パスワードなどの機密データを保護できます。
デバイスのパスワードは主にデータおよびサービスを保護します。Axisデバイスは、さまざまなタイプのインストールで使用できるようにするためパスワードポリシーを強制しません。
データを保護するために、次のことが強く推奨されています。
8文字以上のパスワードを使用する (できればパスワード生成プログラムで作成する)。
パスワードを公開しない。
一定の期間ごとにパスワードを変更する (少なくとも年に1回)。
デバイスのソフトウェアが改ざんされていないことを確認する
- 装置に元のAXIS OSが搭載されていることを確認するか、またはセキュリティ攻撃が行われた後に装置を完全に制御するには、以下の手順に従います。
工場出荷時の設定にリセットします。工場出荷時の設定にリセットするを参照してください。
リセットを行うと、セキュアブートによって装置の状態が保証されます。
デバイスを設定し、インストールします。
webインターフェースの概要
このビデオでは、装置のwebインターフェースの概要について説明します。
デバイスを構成する
基本設定
電源周波数を設定する
[Video (ビデオ)] > [Installation (インストール)] > [Power line frequency (電源周波数)] に移動します。
電源周波数を選択し、[Save and restart (保存して再起動)] をクリックします。
キャプチャーモードを設定する
[Video (ビデオ)] > [Installation (インストール)] > [Capture mode (キャプチャーモード)] に移動します。
[Change (変更)] をクリックします。
キャプチャーモードを選択し、[Save and restart (保存して再起動する)] をクリックします。
キャプチャーモードも参照してください。
画像を調整する
このセクションでは、デバイスの設定について説明します。特定の機能の詳細については、詳細情報を参照してください。
露出モードを選択する
監視カメラのシーンに合わせて画質を向上させるには、露出モードを使用します。露出モードでは、開口、シャッター、ゲインを制御できます。[Video (ビデオ) > Image (画像) > Exposure (露出)] に移動し、以下の露出モードから選択します。
ほとんどの用途では、[Automatic (自動)] 露出を選択します。
蛍光灯など、特定の人工照明がある環境では、[Flicker-free (ちらつき防止)] を選択します。
電源周波数と同じ周波数を選択します。
蛍光灯照明がある夜間の屋外や太陽光が射す日中の屋外など、特定の人工照明や明るい光がある環境では、[Flicker-reduced (ちらつき低減)] を選択します。
電源周波数と同じ周波数を選択します。
現在の露出設定を固定するには、[Hold current (現在の状態で固定)] を選択します。
赤外線照明を最適化する
シーン内の外部光源など、設置環境やカメラの周囲の状況によっては、LEDの強度を手動で設定すると、画質が改善される場合があります。LEDからの反射に問題がある場合は、強度を下げてみてください。
[Video (ビデオ)] > [Image (画像)] > [Day-night mode (デイナイトモード)] に移動します。
[Allow illumination (照明を許可)] をオンにします。
ライブビューでをクリックし、[Manual (手動)]を選択します。
強度を調整します。
ナイトモードを使用して低光量下で赤外線照明からメリットを得る
日中、カメラは可視光を利用してカラー画像を提供します。しかし、可視光線が薄くなると、色の画像は明るく鮮明になります。この場合、ナイトモードに切り替えた場合、カメラは可視光と近赤外線の両方の光を使用して、代わりに明るい画像と詳細な白黒画像を提供します。カメラが自動的にナイトモードに切り替わります。
[Video > Image > Day and night (設定 > 画像 > デイナイト)] に移動し、[IR cut filter (IRカットフィルター)] が [Auto (自動)] に設定されていることを確認します。
[Allow illumination (照明を許可)] と [Synchronize illumination (照明の同期)] を有効にすると、ナイトモードのときにカメラ内蔵の赤外線照明を使用できます。
低照度環境でノイズを減らす
低照度の条件下でノイズを少なくするために、以下のうち1つ以上の設定ができます。
ノイズと動きによる画像のブレの間のトレードオフを調整します。[Settings > Image > Exposure (設定 > 画像 > 露出)] に移動し、[Blur-noise trade-off (ブレとノイズのトレードオフ)] スライダーを [Low noise (低ノイズ)] の方に動かします。
[露出モード] を [自動] に設定します。
- 注
最大シャッター値が高いと、動きによる画像のブレが生じる場合があります。
シャッター速度を遅くするには、最大シャッターをできるだけ大きな値に設定します。
- 注
最大ゲインを下げると、画像が暗くなる場合があります。
最大ゲインをより低い値に設定します。
開口部スライダーがある場合は、開口部の方向に動かします。
[Video (ビデオ)] > [Image (画像)] > [Appearance (外観)] で、画像のシャープネスを下げます。
低光量下で動きによる画像のブレを減らす
- 低光量の条件下で画像のブレを少なくするために、[Video (ビデオ) > Image (画像) > Exposure (露出)] で次の1つ以上の設定を調整することができます。
- 注
ゲインを大きくすると、画像のノイズが多くなります。
[Max shutter (最大シャッター)] を短い時間に設定し、[Max gain (最大ゲイン)] をより高い値に設定します。
- それでも動きによる画像のブレに問題がある場合は、
シーン内の光源レベルを上げます。
物体が横向きではなく、カメラの方へ移動するか、カメラから離れるように移動するようにカメラを取り付けます。
最大限に詳細な画像を撮影する
最大限に詳細な画像を撮影すると、ビットレートが増加し、フレームレートが低下する場合があります。
解像度が最大のキャプチャーモードを選択したことを確認してください。
[Video (ビデオ) > Stream (ストリーム) > General (一般)] に移動し、圧縮率を可能な限り低く設定します。
ライブビュー画像の下でをクリックし、[Video format (ビデオ形式)]で[MJPEG]を選択します。
Video > Stream > Zipstream (ビデオ > ストリーム > Zipstream)に移動し、[Off (オフ)] を選択します。
逆光の強いシーンを処理する
ダイナミックレンジとは、画像内の明るさのレベルの差のことです。最も暗い部分と最も明るい部分の差がかなり大きい場合があります。その場合、暗い部分か明るい部分の画像だけが見えることがよくあります。ワイドダイナミックレンジ (WDR) を使用すると、画像の暗い部分と明るい部分の両方が見えるようになります。


- WDRを使用すると、画像にノイズが発生することがあります。
- WDRは、一部のキャプチャーモードでは使用できない場合があります。
[Settings > Image > Wide dynamic range (設定 > 画像 > ワイドダイナミックレンジ)] に移動します。
WDR をオンにします。
[Local contrast (ローカルコントラスト)] スライダーを使用して、WDRの量を調整します。
それでも問題が発生する場合は、[Exposure (露出)] に移動して [Exposure zone (露出エリア)] を調整し、対象範囲をカバーします。
WDRとその使用方法の詳細については、axis.com/web-articles/wdrをご覧ください。
揺れる映像を動体ブレ補正によって安定させる
動体ブレ補正は、例えば風や通行車両による振動が発生するような、露出した場所に本製品が設置されている環境に適しています。
この機能を使用すると、画像がより滑らかになり、安定し、ブレにくくなります。また、圧縮された画像のファイルサイズが削減され、ビデオストリームのビットレートも低くなります。
動体ブレ補正を有効にすると、画像がわずかにトリミングされて、最大解像度が低下します。
[Video (ビデオ)] > [Installation (インストール)] > [Image correction (画像補正)] に移動します。
[Image stabilization (動体ブレ補正)] をオンにします。
プライバシーマスクで画像の一部を非表示にする
1つ以上のプライバシーマスクを作成して、画像の一部を隠すことができます。
[Video (ビデオ) > Privacy masks (プライバシーマスク)] に移動します。
をクリックします。
新しいマスクをクリックし、名前を入力します。
必要に応じて、プライバシーマスクのサイズと位置を調整します。
すべてのプライバシーマスクの色を変更するには、[Privacy masks (プライバシーマスク)] をクリックし、色を選択します。
プライバシーマスクも参照してください。
画像オーバーレイを表示する
ビデオストリームのオーバーレイとして画像を追加することができます。
[Video (ビデオ)] > [Overlays (オーバーレイ)] に移動します。
画像管理をクリックします。
画像をアップロードまたはドラッグアンドドロップします。
[Upload (アップロード)] をクリックします。
ドロップダウンリストから画像を選択して、をクリックします。
画像と位置を選択します。ライブビューのオーバーレイ画像をドラッグして位置を変更することもできます。
画像内にレーダーのライブビューを表示する
画面上のコントロールを使用して、同じストリームでビデオのライブビューとレーダーの両方を表示できます。
[Video > Image (ビデオ > 画像)] に移動します。
ライブビューで をクリックして、製品の画面上のコントロールにアクセスします。
[Predefined controls (既定のコントロール)] を選択します。
[Radar picture-in-picture (レーダーピクチャーインピクチャー)] をオンにします。
[Enable picture-in-picture (ピクチャーインピクチャーを有効にする)] をクリックします。
レーダー投影のサイズを変更する場合は、[Resize picture-in-picture (ピクチャーインピクチャーのサイズを変更する)] をクリックします。
レーダー投影の位置を変更するには、[Move picture-in-picture (ピクチャーインピクチャーを移動する)] をクリックします。
画像に街路名とコンパス方位を追加する
すべてのビデオストリームと録画に、街路名とコンパス方位が表示されます。
[Apps] (アプリ) に移動します。
[Axis-orientationaid] をを選択します。
[Open] (開く) をクリックします。
ストリートの名前を追加するには、[Add text (テキストの追加)] をクリックし、そのストリートに合うようにテキストを変更します。
コンパスを追加するには、[Add compass (コンパスを追加する)] をクリックし、画像に合わせてコンパスを変更します。
ビデオを録画して見る
- カメラから直接ビデオを録画する
[Video (ビデオ) > Stream (ストリーム)] に移動します。
録画を開始するには、をクリックします。
ストレージを設定していない場合は、およびをクリックします。ネットワークストレージの設定手順については、ネットワークストレージを設定するを参照してください。
録画を停止するには、もう一度をクリックします。
- ビデオを見る
[Recordings (録画)] に移動します。
リスト内で録画のをクリックします。
ビデオを表示する、録画する
このセクションでは、デバイスの設定について説明します。ストリーミングとストレージの動作の詳細については、ストリーミングとストレージを参照してください。
帯域幅とストレージ容量を削減する
帯域幅を削減すると、画像の詳細が失われる場合があります。
[Video (ビデオ) > Stream (ストリーム)] に移動します。
ライブビューでをクリックします。
装置がAV1をサポートしている場合は、[Video format (ビデオ形式) AV1] を選択します。サポートしていない場合は [H.264] を選択します。
[Video (ビデオ) > Stream (ストリーム) > General (一般)] に移動し、[Compression (圧縮率)] を上げます。
[Video > Stream > Zipstream (ビデオ > ストリーム > Zipstream)] に移動し、以下の1つまたは複数の手順を実行します。
- 注
[Zipstream] の設定は、MJPEGを除くすべてのビデオエンコーディングに使用されます。
使用するZipstreamのStrength (強度)を選択します。
[Optimize for storage (ストレージ用に最適化)] をオンにします。この機能は、ビデオ管理ソフトウェアがBフレームをサポートしている場合にのみ使用できます。
[Dynamic FPS (ダイナミックFPS)] をオンにする。
[Dynamic GOP (ダイナミックGOP)] をオンにし、GOP 長を高い [Upper limit (上限)] に設定する。
ほとんどのWebブラウザーはH.265のデコードに対応していないため、装置はwebインターフェースでH.265をサポートしていません。その代わり、H.265デコーディングに対応したビデオ管理システムやアプリケーションを使用できます。
ネットワークストレージを設定する
- ネットワーク上に録画を保存するには、以下のようにネットワークストレージを設定する必要があります。
[System > Storage (システム > ストレージ)] に移動します。
[Network storage (ネットワークストレージ)]で[Add network storage (ネットワークストレージを追加)]をクリックします。
ホストサーバーのIPアドレスを入力します。
[Network Share (ネットワーク共有)] で、ホストサーバー上の共有場所の名前を入力します。
ユーザー名とパスワードを入力します。
SMBバージョンを選択するか、[Auto (自動)] のままにします。
一時的な接続の問題が発生した場合や、共有がまだ設定されていない場合は、[ Add share without testing (テストなしで共有を追加する)] を選択します。
[追加] をクリックします。
レーダーの設定
レーダービデオ融合カメラは、カメラとレーダーモジュールが完全に整合するように工場でキャリブレーションされています。レンズ、光学ユニット、レーダーモジュールを動かしたり、取り外したりすると、キャリブレーションと整合が元に戻ってしまうため、絶対に行わないでください。
レーダープロファイルの選択
このレーダービデオ融合カメラのレーダーには、エリア監視用に最適化されたプロファイルと、道路監視用に最適化されたプロファイルがあります。設置タイプに適したプロファイルを選択してください。
- webインターフェース:
[Radar (レーダー)] > [Settings (設定)] > [Detection (検知)] に移動します。
[Radar profiles (レーダープロファイル)] でプロファイルを選択します。
取り付け高さの設定
レーダーのWebインターフェースで装置の取り付け高さを設定します。この設定によって、レーダーは通過する物体を検知し、その速度を正確に測定できます。
地面から装置までの高さをできるだけ正確に測定してください。表面に凹凸があるシーンでは、シーンの平均高さを表す値を設定します。
高さが正しく設定されていないと、物体が検知されたときにAXIS Object Analyticsで表示される境界ボックスが正確な位置に表示されません。
[Radar (レーダー)] > [Settings (設定)] > [General (全般)] に移動します。
[Mounting height (取り付け高さ)] で高さを設定します。
AXIS Object Analyticsでも取り付け高さを設定できます。ある場所で高さを設定すると、別の場所での取り付け高さが自動的に入力されます。
[Apps (アプリ) > AXIS Object Analytics] に移動します。
アプリケーションを起動し、[Open (開く)] をクリックします。
[Settings (設定)] をクリックします。
[Mounting height (取り付け高さ)] で高さを設定します。
取り付け高さを検証する
装置の正しい取り付け高さを測定して設定したことを検証するには、カメラのライブビューに拡張オーバーレイを追加します。オーバーレイは、動く物体の周りに投影された白い境界ボックスで構成されています。
[Video > Image (ビデオ > 画像)] に移動します。
ライブビューで をクリックして、装置の画面上のコントロールにアクセスします。
[Predefined controls (既定のコントロール)] を展開します。
[Augmented overlay (radar) (拡張オーバーレイ (レーダー))] をオンにします。
[Toggle augmented bounding boxes (拡張境界ボックスを切り替え)] をクリックします。
監視シーン内で誰かに移動してもらい、カメラのライブビューで境界ボックスが動いている物体の周囲に投影されており、動いている物体の上、下、または横に投影されていないことを確認します。
必要に応じて、取り付け高さを再測定して設定を調整し、再度確認します。
- 検証が完了したら、拡張オーバーレイをオフにします。
シーンに高低差がある場合は、オートキャリブレーション機能を使用してレーダー検知に基づく境界ボックスの精度を向上させます。詳細については、装置の自動キャリブレーションを参照してください。
参照マップを使用してキャリブレーションを行う
検知された物体の移動経路を把握しやすくするため、参考用のマップをアップロードすることができます。接地された平面図や、レーダーがカバーする範囲を示す航空写真を使用することができます。レーダービューがマップの位置、向き、縮尺に合うようにマップをキャリブレーションし、シーン内の特定の部分に注目する場合はマップを拡大します。
マップキャリブレーションを段階的に行う設定アシスタントを使用するか、各設定を個別に編集することができます。
- 設定アシスタントを使用する:
[Radar (レーダー)] > [Map calibration (マップのキャリブレーション)] に移動します。
[Setup assistant (設定アシスタント)]をクリックし、手順に従ってください。
- アップロードしたマップと追加した設定を削除するには、[Reset calibration (キャリブレーションをリセット)]をクリックします。
- 各設定を個別に編集する:
- 各設定を調整すると、マップは徐々にキャリブレーションされます。
[Radar (レーダー)] > [Map calibration (マップのキャリブレーション)] > [Map (マップ)]に移動します。
アップロードしたい画像を選択するか、指定エリアにドラッグアンドドロップしてください。
現在のパンとズームの設定でマップ画像を再利用するには、[Download map (マップをダウンロード)]をクリックします。
[Rotate map (マップを回転)] で、スライダーを使用してマップを回転させます。
[Scale and distance on a map (マップ上の縮尺と距離)]にアクセスし、マップ上のあらかじめ決めた2点をクリックします。
[Distance (距離)]の下に、マップに追加した2点間の実際の距離を追加します。
[Pan and zoom map (マップのパンとズーム)]にアクセスし、ボタンを使ってマップ画像をパンしたり、拡大・縮小したりします。
- 注
ズーム機能によってレーダーの検知範囲は変わりません。ズーム後、カバー範囲の一部がビューから外れても、レーダーはカバー範囲全体内の動く物体を検知します。撮影シーン内の動きを除外する唯一の方法は、除外範囲を追加することです。詳細については、除外範囲の追加を参照してください。
[Radar position (レーダーの位置)]に移動し、ボタンを使ってマップ上のレーダーの位置を移動または回転させます。
- アップロードしたマップと追加した設定を削除するには、[Reset calibration (キャリブレーションをリセット)]をクリックします。
検知ゾーンの設定
動きを検知する場所を決定するには、1つ以上の検知ゾーンを追加します。ゾーンによってトリガーするアクションが異なります。
- ゾーンには次の2種類があります。
scenario (シナリオ) (以前は対象範囲と呼ばれていた) は、動く物体によってルールがトリガーされるエリアです。デフォルトのシナリオはレーダーによってカバーされるエリア全体です。
[exclude zone (除外範囲)] は、動く物体が無視されるエリアです。シナリオ内に不要なアラームが何度もトリガーされる範囲がある場合に、除外範囲を使用します。
シナリオの追加
シナリオは、トリガー条件と検知設定の組み合わせであり、イベントシステムでルールを作成するために使用できます。シーンの部分別に異なるルールを作成する場合は、シナリオを追加します。
- シナリオを追加する:
[Radar > Scenarios (レーダー > シナリオ)] に移動します。
[Add scenario (シナリオの追加)] をクリックします。
シナリオの名前を入力します。
物体がエリアに侵入した場合にトリガーするか、1本または2本のラインを横切った場合にトリガーするかを選択します。
- エリア内で動く物体でトリガーする:
[Movement in area (エリアへの侵入)] を選択します。
[Next (次へ)] をクリックします。
シナリオに含めるゾーンのタイプを選択します。
レーダー画像または参照マップの目的の部分が覆われるように、マウスを使用してゾーンを移動し、形状を設定します。
[Next (次へ)] をクリックします。
検知設定を追加します。
[Ignore short-lived objects (一時的な物体を無視)] で、トリガーを発動するまでの秒数を追加します。
[Trigger on object type (物体タイプでトリガー)] で、トリガーを発動する物体のタイプを選択します。
[Speed limit (速度制限)] で、速度制限の範囲を追加します。
[Next (次へ)] をクリックします。
[Minimum trigger duration (最小トリガー継続時間)] でアラームの最小継続時間を設定します。
[保存] をクリックします。
- ラインを横断する物体でトリガーする:
[Line crossing (ライン横断)] を選択します。
[Next (次へ)] をクリックします。
シーン内にラインを配置します。
マウスを使用して、ラインを移動したり形状を変更したります。
検知方向を変更するには、[Change direction (方向の変更)] をオンにします。
[Next (次へ)] をクリックします。
検知設定を追加します。
[Ignore short-lived objects (一時的な物体を無視)] で、トリガーを発動するまでの秒数を追加します。
[Trigger on object type (物体タイプでトリガー)] で、トリガーを発動する物体のタイプを選択します。
[Speed limit (速度制限)] で、速度制限の範囲を追加します。
[Next (次へ)] をクリックします。
[Minimum trigger duration (最小トリガー継続時間)] でアラームの最小継続時間を設定します。
デフォルト値は2秒に設定されています。物体がラインを横切るたびにシナリオをトリガーする場合は、継続時間を0秒にします。
[保存] をクリックします。
- 2本のラインを横切る物体でトリガー:
[Line crossing (ライン横断)] を選択します。
[Next (次へ)] をクリックします。
物体が2本のラインを横切ったときにアラームがトリガーされるようにするには、[Require crossing of two lines (2本のラインを横断することが必要)] をオンにします。
シーン内にラインを配置します。
マウスを使用して、ラインを移動したり形状を変更したります。
検知方向を変更するには、[Change direction (方向の変更)] をオンにします。
[Next (次へ)] をクリックします。
検知設定を追加します。
[Max time between crossings (ライン横断間の最大時間)] で、最初のラインを横切ってから2番目のラインを横切るまでの最大時間を設定します。
[Trigger on object type (物体タイプでトリガー)] で、トリガーを発動する物体のタイプを選択します。
[Speed limit (速度制限)] で、速度制限の範囲を追加します。
[Next (次へ)] をクリックします。
[Minimum trigger duration (最小トリガー継続時間)] でアラームの最小継続時間を設定します。
デフォルト値は2秒に設定されています。物体が2本のラインを横切るたびにシナリオをトリガーする場合は、継続時間を0秒にします。
[保存] をクリックします。
除外範囲の追加
除外範囲は、動く物体が無視されるエリアです。除外範囲を追加して、たとえば道路脇の揺れる葉が無視されるようにします。除外範囲を追加して、レーダーを反射する素材 (金属フェンスなど) によるゴースト追跡が無視されるようにすることもできます。
- 除外範囲を追加する:
[Radar (レーダー)] > [Exclude zones (除外範囲)] に移動します。
[Add exclude zone (除外範囲の追加)] をクリックします。
レーダービューまたは参照マップの目的の部分が覆われるように、マウスを使用してゾーンを移動し、形状を設定します。
装置の自動キャリブレーション
レーダーとビデオの融合カメラの自動キャリブレーションにより、AXIS Object Analyticsで検知された物体の周囲に表示される境界ボックスの精度が向上します。自動キャリブレーションにより、装置は、レーダー検知に基づく境界ボックスの位置決めを改善するために、高さや角度精度などのビデオからの情報を使用します。
自動キャリブレーションは検知には影響せず、境界ボックスの視覚化のみに影響します。
- 高度キャリブレーションを行うには、以下の手順に従います。
[Radar > Autocalibration > Elevation (レーダー > 自動キャリブレーション > 高度)] に進みます。
[Autocalibration (自動キャリブレーション)] をオンにします。
自動キャリブレーションは、キャリブレーションデータが利用可能になるとすぐに行われます。
[Smoothing (スムージング)] オプションを選択します。
シーンで高度の変動が少ない場合は、[Smoothing (スムージング)] を [High (高)] のままにします。
シーンが、丘の多いまたは傾いている場合、または階段や高い建物がある場合は、[Smoothing (スムージング)] を [Low (低)] に設定し、高度差を維持します。
以下のオプションを使用して、webインターフェースでキャリブレーションの結果を視覚化します。
[Show elevation pattern (高度パターンを表示する)] により、地面からカメラまでの垂直距離が色付きドットのパターンで示されます。
[Show color legend (色の凡例を表示する)] により、高度パターンの色と各色が示す垂直距離を含む凡例が表示されます。
[Show reference area (参照エリアを表示する)] により、キャリブレーションの基準となるエリアが表示されます。
- 方位角キャリブレーションを行うには、以下の手順に従います。
[Radar > Autocalibration > Azimuth (レーダー > 自動キャリブレーション > 方位角)] に移動します。
[Autocalibration (自動キャリブレーション)] をオンにします。
自動キャリブレーションは、キャリブレーションデータが利用可能になるとすぐに行われます。
レーダーのチルト角度をテキストオーバーレイに表示する
レーダーのライブビューに、レーダーのチルト角度を示すオーバーレイを追加できます。これは、設置時や装置のチルト角度を知る必要がある場合に役立ちます。
装置が水平な場合、チルト角度のオーバーレイには「90」と表示されます。オーバーレイに「75」と表示されている場合、レーダーのチルト角度は地平線から15°下になります。
[Radar > Overlays (レーダー > オーバーレイ)] に移動します。
[Text (テキスト)]を選択し、をクリックします。
「#op」と入力します。
[Modifier (修飾子)] をクリックし、リストから [#op] を選択することもできます。
位置を選択します。ライブビューのオーバーレイフィールドをドラッグして位置を変更することもできます。
AXIS Object Analyticsの設定
AXIS Object Analyticsは、動く物体を検知して分類するAIベースのアプリケーションです。また、AXIS Q1656-DLEののレーダーとビデオの融合を設定するための主要なインターフェースでもあります。融合のリアルタイム出力は、アプリケーションで設定したシナリオ内のビデオストリームでのみ見ることができます。
シナリオを作成します
AXIS Object Analyticsのシナリオを使用して、レーダービデオ融合カメラの検知設定とトリガー条件を定義します。
装置のwebインターフェースで、[Apps (アプリ)] > [AXIS Object Analytics] に移動します。
アプリケーションを起動し、[Open (開く)] をクリックします。
ようこそ画面で、[Step-by-step (段階的な手順)] をクリックし、推奨される設定手順に従います。
[Considerations (考慮事項)] で情報を読み、[Finish (完了)] をクリックします。
[+ New scenario (+新規シナリオ)] をクリックします。
- 注
デフォルトでは、[Object in area (物体の対象範囲への侵入)] と [Line crossing (ライン横断)] シナリオは、ビデオとレーダーの両方の入力を使用します。AXIS Object Analyticsの他のシナリオでは、ビデオ入力のみを使用します。
要件に基づいてシナリオを選択します。
アプリケーションで検知する物体のタイプを選択します。
シナリオを設定します。
設定を確認し、[Finish (完了)] をクリックします。
- 注
動く物体の周囲に境界ボックスを表示するには、[Settings (設定)] で [Metadata overlay (メタデータオーバーレイ)] をオンにします。ビデオ入力とレーダー入力の両方を使用するシナリオと、ビデオ入力のみを使用するシナリオの2つのシナリオを作成すると、動く物体の周囲に2つの境界ボックスが表示されます。この動作は正常です。
これで、AXIS Object Analyticsでシナリオが作成されました。シナリオを変更し、追加の設定を適用するには、[Open (開く)] をクリックします。レーダーとビデオの両方の入力を使用するシナリオでは、速度をトリガーとして使用し、検知感度を選択できます。手順については、以下を参照してください。
AXIS Object Analyticsとその全般設定の詳細については、AXIS Object Analyticsユーザーマニュアルを参照してください。
AXIS Object Analyticsユーザーマニュアルに記載されている考慮事項と機能の一部は、レーダービデオ融合カメラには適用されません。
速度を使用してトリガーする
AXIS Object Analyticsで [Object in area (範囲内の物体)] または [Line crossing (ライン横断)] シナリオを作成した場合は、設定した速度範囲内、またはそれ以上および以下で移動する物体をトリガーできます。
[Apps (アプリ) > AXIS Object Analytics] に移動します。
アプリケーションを起動し、[Open (開く)] をクリックします。
変更するシナリオを選択し、[Open (開く)] をクリックします。
[Object speed (物体の速度)] に進み、[Use speed to trigger (トリガーに速度を使用する)] をオンにします。
トリガーする速度範囲を設定します。
設定した範囲を上回るまたは下回る速度でトリガーするには、[Invert (反転)] をクリックします。
検知感度の選択
検知感度を選択することで、ビデオとレーダーのどちらか一方、または両方での検知をトリガーとすることができます。また、融合アルゴリズムに基づいて装置自体が、どちらか一方の技術に依存するか、あるいは両方に依存するかを決定するようにもできます。
このオプションは [Object in area (範囲内の物体)] および [Line crossing (ライン横断)] シナリオで使用できます。
[Apps (アプリ) > AXIS Object Analytics] に移動します。
アプリケーションを起動し、[Open (開く)] をクリックします。
変更するシナリオを選択し、[Open (開く)] をクリックします。
[Detection sensitivity (検知感度)] に移動し、以下のオプションのいずれかを選択します。
Low sensitivity (低感度):レーダーとカメラの両方が物体を検知する必要があります。誤報のリスクは低くなりますが、検知漏れのリスクは高くなります。
両方の技術で物体を検知できるようにするには、シーンがあまり複雑にならないようにしてください。照明条件が良好であり、検知エリアが両方の技術の検知範囲内にあることが必要で、できれば木や低木などの邪魔になる要素がないことが望まれます。
Automatic (自動):物体の検知にレーダーとカメラの両方が必要か、どちらかだけで良いかをアプリケーションが判断します。これはデフォルトのオプションです。
High sensitivity (高感度):レーダーとカメラのいずれかが物体を検知する必要があります。誤報のリスクは高くなりますが、検知漏れのリスクは低くなります。
高感度を選択した場合、物体の検知にはどちらか一方の技術だけが必要なため、照明条件や検知エリアのサイズはあまり重要ではありません。
自動キャリブレーション機能を使用すると、AXIS Object Analyticsで物体の周囲に表示される境界ボックスの精度を向上させることができます。自動キャリブレーションは検知には影響せず、境界ボックスの表示のみに影響します。
詳細については、装置の自動キャリブレーションを参照してください。
誤報を最小限に抑える
誤報が多すぎるときは、特定の種類の動きや物体をフィルター処理するか、対象範囲を変更する、あるいは検知感度を調節してください。環境に対する最適な設定を特定してください。
AXIS Object Analyticsの検知感度を調整:
[Apps > AXIS Object Analytics (アプリ > AXIS Object Analytics)] に移動し、シナリオを開いて、現在より低いDetection sensitivity (検知感度) を選択します。
Low sensitivity (低感度):レーダーとカメラの両方が物体を検知する必要があります。誤報のリスクは低くなりますが、検知漏れのリスクは高くなります。
Automatic (自動):物体の検知にレーダーとカメラの両方が必要か、どちらかだけでよいかをアプリケーションが判断します。
High sensitivity (高感度):レーダーとカメラのいずれかが物体を検知する必要があります。誤報のリスクが増しますが、検知を見逃すリスクは低くなります。
レーダーの検知感度を調整:
[Radar > Settings> Detection (レーダー > 設定 > 検知)] に移動して、現在より低いDetection sensitivity (検知感度) を選択します。これにより誤報のリスクは下がりますが、レーダーが特定の動きの検知を見逃すことがあります。
低:この感度は、エリア内に金属物体や大型車両が多いときに使用します。レーダーが物体を追跡および分類するには、より長い時間がかかります。この感度では、特に高速で動く物体の検知範囲が狭くなります。
中間:デフォルトの設定です。
高:この感度は、レーダーの前に金属物体のない広い場所があるときに使用します。この感度では、人の検知範囲が広くなります。
シナリオと除外範囲を変更する:
シナリオに金属製の壁などの硬い表面が含まれている場合、1つの物体に対して複数の検知が行われるような反射が生じることがあります。シナリオの形状を変更することも、シナリオの特定の部分を無視する除外ゾーンを追加することもできます。詳細については、シナリオの追加 および除外範囲の追加 を参照してください。
物体が1本のラインではなく2本のラインを横切るとトリガーします。
ライン横断シナリオに揺らめいている物体や動き回る動物が含まれている場合、物体がたまたまラインを横切って誤報をトリガーするリスクがあります。この場合、物体が2本のラインを横切ったときにのみシナリオをトリガーするように設定できます。詳細については、シナリオの追加を参照してください。
動きのフィルター処理:
[Radar > Settings > Detection (レーダー > 設定 > 検知)] に移動し、[Ignore swaying objects (揺らめいている物体を無視)] を選択します。この設定では、検知対象ゾーン内の木、茂み、旗竿などによる誤報が最小限に抑えられます。
[Radar (レーダー)] > [Settings (設定)] > [Detection (検知)] に移動し、[Ignore small objects (小さな物体を無視)] を選択します。この設定では、検知対象ゾーン内の猫やウサギなどの小さな物体による誤報が最小限に抑えられます。
時間のフィルター処理:
[Radar > Scenarios (レーダー > シナリオ)] に移動します。
シナリオを選択し、をクリックして設定を変更します。
[Seconds until trigger (トリガーまでの秒数)] で高い値を選択します。これは、レーダーが物体の追跡を開始してから、アラームをトリガーできるまでの遅延時間です。タイマーは、物体がシナリオの指定されたゾーンに入ったときではなく、レーダーが最初に物体を検知したときに開始されます。
物体のタイプのフィルター処理:
[Radar > Scenarios (レーダー > シナリオ)] に移動します。
シナリオを選択し、をクリックして設定を変更します。
特定の物体のタイプでトリガーされないようにするには、このシナリオでイベントをトリガーする物体のタイプの選択を解除します。
- 注
物体タイプの設定は、レーダーにのみ影響します。これはAXIS Object Analyticsによって無視されます。
イベントのルールを設定する
詳細については、「イベントのルールの使用開始」を参照してください。
動きが検知されないときに電力を節約する
この例では、シーン内で動きが検知されないときに省電力モードをオンにする方法について説明します。
省電力モードをオンすると、赤外線照明の範囲が小さくなります。
- AXIS Object Analyticsが実行されていることを確認します。
[Apps (アプリ) > AXIS Object Analytics] に移動します。
アプリケーションが実行されていない場合は、起動します。
ニーズに合わせてアプリケーションを設定していることを確認します。
- ルールの作成:
[System > Events (システム > イベント)] に移動し、ルールを追加します。
ルールの名前を入力します。
[Application (アプリケーション)] の [Object Analytics] を選択します。
[Invert this condition (この条件を逆にする)] を選択します。
[Power saving mode (省電力モード)] のアクションのリストで、[Use power saving mode while the rule is active (ルールがアクティブである間、省電力モードを使用する)] を選択します。
[保存] をクリックします。
囲いが開かれたときに通知をトリガーする
この例では、デバイスのハウジングまたはケーシングが開けられたときの電子メール通知を設定する方法を説明します。
- メール送信先を追加する:
[System (システム)] > [Events (イベント)] > [Recipients (送信先)] に移動し、[Add recipient (送信先の追加)] をクリックします。
送信先の名前を入力します。
通知のタイプとして電子メールを選択します。
送信先の電子メールアドレスを入力します。
カメラが通知を送信する際の、送信元電子メールアドレスを入力します。
電子メール送信用アカウントのログイン詳細とSMTPホスト名、ポート番号を入力します。
電子メールの設定をテストするには、[Test (テスト)] をクリックします。
[保存] をクリックします。
- ルールの作成:
[System > Events > Rules (システム > イベント > ルール)] に移動し、[Add a rule (ルールの追加)] をクリックします。
ルールの名前を入力します。
条件のリストで、[Casing open (ケーシング開放)] を選択します。
アクションのリストで、[Send notification to email (電子メールに通知を送信する)] を選択します。
リストから送信先を選択します。
電子メールの件名とメッセージを入力します。
[保存] をクリックします。
誰かがレーダーを金属製の物体で覆った場合に電子メールを送信する
この例では、金属箔や金属板などの金属製の物体でレーダーを覆うことで誰かがレーダーにいたずらした場合に電子メール通知を送信するルールを作成する方法について説明します。
- メール送信先を追加する:
[System > Events > Recipients (システム > イベント > 送信先)] に移動し、送信先を追加します。
送信先の名前を入力します。
[Type (タイプ)] 配下で [Email (電子メール)] を選択します。
電子メールの送信先のメールアドレスを入力します。
メールプロバイダーに従って、残りの情報を入力します。
レーダーデバイスには独自のメールサーバーがないため、メールを送信するにはメールサーバーにログインする必要があります。
テストメールを送信するには、[Test (テスト)] をクリックします。
[保存] をクリックします。
- ルールの作成:
[System > Events (システム > イベント)] に移動し、ルールを追加します。
ルールの名前を入力します。例
Tampering mail。条件リストの [Device status (デバイスステータス)] で、[Radar data failure (レーダーデータの障害)] を選択します。
[Reason (理由)] で [Tampering (いたずら)] を選択します。
アクションのリストで、[Notifications (通知)] の下の [Send notification to email (通知を電子メールに送信)] を選択します。
作成した送信先を選択します。
メールの件名とメッセージを入力します。
[保存] をクリックします。
レーダーでPTZカメラを制御する
レーダーからの物体の位置に関する情報を使用して、PTZカメラで物体を追跡することができます。これを行うには、以下の2つの方法があります。
内蔵レーダーオートトラッキングサービスを使用してPTZカメラを制御する. 内蔵オプションは、PTZカメラとレーダーを非常に近くに取り付ける場合に適しています。
AXIS Radar Autotracking for PTZを使用してPTZカメラを制御する. Windowsアプリケーションは、複数のPTZカメラとレーダーを使用して物体を追跡する場合に適しています。
NTPサーバーを使用して、カメラとWindowsコンピューターの時刻を同期します。時計が同期していない場合は、追跡の遅延やゴースト追跡が発生する場合があります。
内蔵レーダーオートトラッキングサービスを使用してPTZカメラを制御する
内蔵レーダーオートトラッキングにより、レーダーがPTZカメラを直接制御するエッジツーエッジソリューションが実現します。このサービスはすべてのAxis PTZカメラに対応しています。
内蔵レーダーオートトラッキングサービスを使用して、1台のレーダーを1台のPTZカメラに接続できます。複数のレーダーまたはPTZカメラを使用する設定では、AXIS Radar Autotracking for PTZを使用します。詳細については、AXIS Radar Autotracking for PTZを使用してPTZカメラを制御するを参照してください。
この手順では、レーダーとPTZカメラをペアリングする方法、装置を調整する方法、物体の追跡を設定する方法について説明します。
開始する前に、以下をご確認ください。
レーダーに除外範囲を設定することで、対象範囲を定義し、不要なアラームを回避することができます。PTZカメラが無関係な物体を追跡しないように、レーダーを反射する素材や揺らめいている物体 (樹木など) があるゾーンを除外してください。手順については、除外範囲の追加を参照してください。
- レーダーをPTZカメラとペアリングする:
[System > Edge-to-edge > PTZ pairing (システム > エッジツーエッジ > PTZペアリング)] に移動します。
PTZカメラのIPアドレス、ユーザー名、パスワードを入力します。
[接続] をクリックします。
[Configure Radar autotracking (レーダーオートトラッキングの設定)] をクリックするか、[Radar > Radar PTZ autotracking (レーダー > レーダーPTZオートトラッキング)] に移動して、レーダーオートトラッキングを設定します。
- レーダーとPTZカメラのキャリブレーションを行う:
[Radar > Radar PTZ autotracking (レーダー > レーダーPTZオートトラッキング)] に移動します。
カメラの取り付け高さを設定するには、[Camera mounting height (カメラの取り付け高さ)] に移動します。
レーダーと同じ方向を向くようにPTZカメラをパンするには、[Pan alignment (パン位置合わせ)] に移動します。
傾斜した地面を補正するためにチルトを調整する必要がある場合は、[Ground incline offset (地面の傾斜オフセット)] に移動し、度単位でオフセットを追加します。
- PTZトラッキングを設定する:
[Track (追跡)] に移動して、人、車両、未知の物体を追跡するかどうかを選択します。
PTZカメラで物体のトラッキングを開始するには、[Tracking (トラッキング)] をオンにします。
トラッキングでは、物体または物体グループがカメラの視野に収まるように自動的にズームインされます。
複数の物体がカメラビューに収まらないと予想される場合は、[Object switching (物体の切り替え)] をオンにします。
この設定では、レーダーが追跡する物体に優先順位を付けます。
各物体を何秒間追跡するかを決定するには、[Object hold time (物体の追跡期間)] を設定します。
レーダーが物体の追跡を終えたときにPTZカメラをホームポジションに戻すには、[Return to home (ホームに復帰)] をオンにします。
PTZカメラがホームに復帰する前に、追跡していた物体を最後に検知した位置にとどまる時間を決定するには、[Return to home timeout (ホームに復帰するまでのタイムアウト)] を設定します。
PTZカメラのズームを微調整するには、スライダーでズームを調整します。
AXIS Radar Autotracking for PTZを使用してPTZカメラを制御する
AXIS Radar Autotracking for PTZはサーバーベースのソリューションであり、物体を追跡するときのさまざまな設定に対応できます。
1つのレーダーで複数のPTZカメラを制御する。
複数のレーダーで1つのPTZカメラを制御する。
複数のレーダーで複数のPTZカメラを制御する。
同じエリアをカバーする異なる位置に取り付けられているときに、1つのレーダーで1つのPTZカメラを制御する。
このアプリケーションは、特定のPTZカメラに対応しています。詳細については、axis.com/products/axis-radar-autotracking-for-ptz#compatible-productsを参照してください。
アプリケーションをダウンロードします。アプリケーションの設定方法については、ユーザーマニュアルを参照してください。詳細については、axis.com/products/axis-radar-autotracking-for-ptz/supportを参照してください。
MQTTを使用してレーダーデータを送信する
レーダービデオ融合カメラとAXIS Speed Monitorアプリケーションを使用して、検知された物体のレーダーデータを収集し、MQTTを介してデータを送信します。
この例では、AXIS Speed Monitorをインストールした装置でMQTTクライアントを設定する方法と、AXIS Speed Monitorで収集したレーダーデータをペイロードとしてMQTTブローカーにパブリッシュする条件を作成する方法について説明します。
- 開始する前に、以下をご確認ください。
AXIS Speed Monitorをレーダービデオ融合カメラにインストールするか、レーダービデオ融合カメラのレーダーに接続するカメラにインストールします。
詳細については、AXIS Speed Monitorユーザーマニュアルを参照してください。
MQTTブローカーを設定し、ブローカーのIPアドレス、ユーザー名、パスワードを取得します。
MQTTおよびMQTTブローカーの詳細については、AXIS OS knowledge base (AXIS OS知識ベース)を参照してください。
- AXIS Speed Monitorをインストールした装置のwebインターフェースで、以下のようにMQTTクライアントを設定します。
[System (システム)] > [MQTT] > [MQTT client (MQTTクライアント)] > [Broker (ブローカー)] に移動し、次の情報を入力します。
[ホスト]:ブローカーのIPアドレス
Client ID (クライアントID): 装置のID
Protocol (プロトコル):ブローカーが設定したプロトコル
ポート:ブローカーが使用するポート番号
ブローカーの Username (ユーザー名) と Password (パスワード)
[ Save (保存) ]をクリックし、[ Connect (接続) ]をクリックします。
- 以下のように、レーダーデータをペイロードとしてMQTTブローカーにパブリッシュする条件を作成します。
[System > MQTT > MQTT publication (システム > MQTT > MQTTパブリッシュ)] に移動し、[+ Add condition (+ 条件の追加)] をクリックします。
[Application (アプリケーション)] の条件のリストで、[Speed Monitor: Track exited zone (Speed Monitor: 出たゾーンを追跡)] を選択します。
これで、装置はシナリオから出る動く物体ごとにレーダー航跡に関する情報を送信できます。すべての物体には、rmd_zone_name、tracking_id、trigger_countなどの独自のレーダー航跡パラメーターがあります。パラメーターの全リストは、AXIS Speed Monitorユーザーマニュアルに記載されています。
カメラが物体を検知したときにビデオを録画する
この例では、カメラが物体を検知したときにSDカードへの録画を開始するようにカメラを設定する方法について説明します。録画には、検知開始前の5秒と検知終了後の1分の映像が含まれます。
開始する前に、以下をご確認ください。
SDカードが装着されていることを確認します。
- AXIS Object Analyticsが実行されていることを確認します。
[Apps (アプリ) > AXIS Object Analytics] に移動します。
アプリケーションが実行されていない場合は、起動します。
ニーズに合わせてアプリケーションを設定していることを確認します。
- ルールの作成:
[System > Events (システム > イベント)] に移動し、ルールを追加します。
ルールの名前を入力します。
[Application (アプリケーション)] の [Object Analytics] を選択します。
アクションのリストで、[Recordings (録画)] の [Record video while the rule is active (ルールがアクティブである間、ビデオを録画する)] を選択します。
ストレージオプションのリストで、[SD_DISK] を選択します。
カメラとストリームプロファイルを選択します。
プリバッファ時間を5秒に設定します。
ポストバッファ時間を [1 minute(1分)] に設定します。
[保存] をクリックします。
進行中のイベントを視覚的に示します
AXIS I/O Indication LEDをネットワークカメラに接続するオプションがあります。このLEDは、カメラ内で特定のイベントが発生したときにオンになるように設定できます。たとえば、映像の録画が進行中であることを人に知らせる場合。
必要なハードウェア
AXIS I/O Indication LED
Axisネットワークビデオカメラ
- 注
AXIS I/O Indication LEDを接続する手順については、本製品に付属のインストールガイドを参照してください。
次の例では、AXIS I/O Indication LEDをオンにして、カメラが録画中であることを示すルールを設定する方法を示します。
[System > Accessories > I/O ports (システム > アクセサリー > I/O ポート)] に移動します。
AXIS I/O Indication LEDの接続先ポートについては、をクリックして方向を[Output (出力)]に設定し、をクリックして通常の状態を[Circuit open (開回路)]に設定します。
[System > Events (システム > イベント)] に移動します。
新しいルールを作成します。
カメラをトリガーして録画を開始するために満たす必要がある [Condition (条件)] を選択します。たとえば、タイムスケジュールや動体検知などを行うことができます。
アクションのリストで、[Record video (ビデオを録画する)] を選択します。ストレージスペースを選択します。ストリームプロファイルを選択するか、新しく作成します。必要に応じて、[Prebuffer (プリバッファ)] と [Postbuffer (ポストバッファ)] も設定します。
ルールを保存します。
2番目のルールを作成し、最初のルールと同じ [Condition (条件)] を選択します。
アクションのリストから、[Toggle I/O while the rule is active (ルールがアクティブである間、I/Oを切り替える)] を選択し、AXIS I/O Indication LEDに接続されているポートを選択します。状態を [Active (アクティブ)] に設定します。
ルールを保存します。
- その他にも、AXIS I/O Indication LEDを使用できるシナリオを以下に示します。
カメラの存在を示すために、カメラの起動時にオンになるようにLEDを構成します。条件として [System ready (システムの準備完了)] を選択します。
人物またはプログラムがカメラからのストリームにアクセスしていることを示すために、ライブストリームがアクティブなときにLEDがオンになるように構成します。条件として [Live stream accessed (ライブストリームのアクセス)] を選択します。
装置が物体を検知したときにビデオストリームにテキストオーバーレイを表示する
この例では、装置が物体を検知したときに「動体検知」というテキストを表示する方法を示します。
- AXIS Object Analyticsが実行されていることを確認します。
[Apps (アプリ) > AXIS Object Analytics] に移動します。
アプリケーションが実行されていない場合は、起動します。
ニーズに合わせてアプリケーションを設定していることを確認します。
- オーバーレイテキストの追加:
[Video (ビデオ)] > [Overlays (オーバーレイ)] に移動します。
[Overlays (オーバーレイ)]で[Text (テキスト)]を選択し、をクリックします。
テキストフィールドに
#Dと入力します。テキストのサイズと外観を選択します。
テキストオーバーレイを配置するには、をクリックしてオプションを選択します。
- ルールの作成:
[System > Events (システム > イベント)] に移動し、ルールを追加します。
ルールの名前を入力します。
[Application (アプリケーション)] の [Object Analytics] を選択します。
アクションのリストで [Overlay text (オーバーレイテキスト)] で、[Use overlay text (オーバーレイテキストを使用する)] を選択します。
ビデオチャンネルを選択します。
[Text (テキスト)] に「動体検知」と入力します。
期間を設定します。
[保存] をクリックします。
オーバーレイテキストを更新すると、自動的にすべてのビデオストリームでテキストが動的に更新されます。
PIR検知器が動きを検知したときにビデオを録画する
この例では、Axis PIR検知器 (NC (Normally Closed)) を装置に接続し、検知器が動きを感知したときにビデオ録画を開始するように装置を設定する方法について説明します。
- 必要なハードウェア
3ワイヤーケーブル (アース、電源、I/O)
PIR検知器、NC (Normally Closed)
ワイヤーを接続する前に、装置を電源から切り離します。すべての接続が完了した後に電源に再接続します。
- 装置のI/Oコネクターにワイヤーを接続する
- 注
I/Oコネクターについては、コネクターを参照してください。
アース線をピン1 (GND/-) に接続します。
電源ワイヤーをピン2 (12 V DC出力) に接続します。
I/Oワイヤーをピン3 (I/O入力) に接続します。
- PIR検知器のI/Oコネクターに配線を接続します
アース線のもう一方の端をピン1 (GND/-) に接続します。
電源ワイヤーのもう一方の端をピン2 (DC入力/+) に接続します。
I/Oワイヤーのもう一方の端をピン3 (I/O出力) に接続します。
装置のwebインターフェースでI/Oポートを設定する
[System > Accessories > I/O ports (システム > アクセサリー > I/O ポート)] に移動します。
をクリックして、ポート1の入力方向を設定します。
入力モジュールに分かりやすい名前を付けます (「PIR detector」など)。
PIR検知器で動きが感知されるたびにイベントがトリガーされるようにする場合は、 をクリックして、通常状態を閉回路に設定します。
- ルールを作成する
[System > Events (システム > イベント)] に移動し、ルールを追加します。
ルールの名前を入力します。
条件の一覧で、[PIR detector (PIR検知器)] を選択します。
アクションのリストで、[Recordings (録画)] の [Record video while the rule is active (ルールがアクティブである間、ビデオを録画する)] を選択します。
ストレージオプションのリストで、[SD_DISK] を選択します。
カメラとストリームプロファイルを選択します。
プリバッファ時間を5秒に設定します。
ポストバッファ時間を [1 minute(1分)] に設定します。
[保存] をクリックします。
カメラが音量の大きいノイズを検知したときにビデオを録画する
この例では、カメラが音量の大きいノイズを検知する5秒前にSDカードへの録画を開始し、2分後に停止するようにカメラを設定する方法を示します。
以下の手順では、マイクが音声入力に接続されている必要があります。
- 音声をオンにする:
音声を含めるようにストリームプロファイルを設定します (録画に音声を追加する参照)。
- 音声検知をオンにする:
[System (システム) > Detectors (検知) > Audio detection (音声検知)] に移動します。
必要に応じて、音声レベルを調整します。
- ルールの作成:
[System > Events (システム > イベント)] に移動し、ルールを追加します。
ルールの名前を入力します。
条件のリストで、[Audio (音声)] の [Audio Detection (音声検知)] を選択します。
アクションのリストで、[Recordings (録画)] の [Record video (ビデオを録画する)] を選択します。
ストレージオプションのリストで、[SD_DISK] を選択します。
音声がオンになっている場合のストリームプロファイルを選択します。
プリバッファ時間を5秒に設定します。
ポストバッファ時間を 2分に設定します。
[保存] をクリックします。
入力信号でいたずらを検知する
この例では、入力信号が切断された場合やショートした場合に電子メールを送信する方法について説明します。I/Oコネクターの詳細については、I/Oコネクターを参照してください。
System (システム) > Accessories (アクセサリー)> I/O ports(I/Oポート) に移動し、該当するポートで Supervised (状態監視)をオンにします。
- メール送信先を追加する:
[System > Events > Recipients (システム > イベント > 送信先)] に移動し、送信先を追加します。
送信先の名前を入力します。
通知のタイプとして電子メールを選択します。
送信先の電子メールアドレスを入力します。
カメラが通知を送信する際の、送信元電子メールアドレスを入力します。
電子メール送信用アカウントのログイン詳細とSMTPホスト名、ポート番号を入力します。
電子メールの設定をテストするには、[Test (テスト)] をクリックします。
[保存] をクリックします。
- ルールの作成:
[System > Events > Rules (システム > イベント > ルール)] に移動し、ルールを追加します。
ルールの名前を入力します。
[I/O (入力/出力)] の条件のリストで、[Supervised input tampering is active (いたずら状態監視を有効化する)] を選択します。
該当するポートを選択します。
[Notifications (通知)] のアクションのリストで、[Send notification to email (電子メールに通知を送る)] を選択し、リストから送信先を選択します。
電子メールの件名とメッセージを入力します。
[保存] をクリックします。
音声
録画に音声を追加する
- 音声をオンにする:
[Video > Stream > Audio (ビデオ > ストリーム> 音声)] に移動し、音声を対象に含めます。
装置に複数の入力ソースがある場合は、ソースで適切な ソースを選択します。
[Audio > Device settings (音声 > デバイスの設定)] に移動し、適切な入力ソースをオンにします。
入力ソースを変更する場合は、[Apply changes (変更を適用する)] をクリックします。
- 録画に使用するストリームプロファイルを編集します:
[System (システム) > Stream profiles (ストリームプロファイル)] に移動し、ストリームプロファイルを選択します。
Include audio (音声を含める) を選択してオンにします。
[保存] をクリックします。
ストロボサイレンに接続する
ネットワークペアリングを使用すると、カメラをライトとサイレン機能を備えたAxisデバイスとペアリングできます。ペアリングが完了すると、カメラで両方のデバイスの設定や管理を行うことができます。
- カメラをストロボサイレンとペアリングする:
[System > Edge-to-edge > Pairing (システム > エッジツーエッジ > ペアリング)] に移動します。
[Add (追加)] をクリックし、ドロップダウンリストからペアリングタイプの [Network pairing (ネットワークペアリング)] を選択します。
ストロボサイレンのIPアドレス、ユーザー名とパスワードを入力します。
[接続] をクリックします。確認メッセージが表示されます。
webインターフェース
AXIS OS搭載デバイスのWebインターフェースで利用可能なすべての機能と設定については、AXIS OSウェブインターフェースのヘルプを参照してください。
詳細情報
長距離接続
- 本製品は、メディアコンバータを経由した光ファイバーケーブルの設置に対応しています。光ファイバーケーブルを設置すると、次のようなメリットが得られます。
長距離接続
高速
長寿命
大容量のデータ送信
電磁干渉耐性
光ファイバーケーブルの設置の詳細については、axis.com/learning/white-papersのホワイトペーパー「長距離監視 - ネットワークビデオにおける光ファイバー通信」を参照してください。
メディアコンバータの設置方法の詳細については、本製品の『インストールガイド』を参照してください。
キャプチャーモード
キャプチャーモードは、カメラが画像をキャプチャーする方法を定義するプリセット設定です。
キャプチャーモード設定により、本装置で利用可能な最大解像度と最大フレームレートを調整できます。
最大解像度よりも低い解像度のキャプチャーモードを使用した場合、視野が狭くなることがあります。
キャプチャーモードはシャッター速度にも影響し、結果として光感度に影響します。これは、最大フレームレートが高いキャプチャーモードでは光感度が下がり、逆に最大フレームレートが低いキャプチャーモードでは、光感度が上がるためです。
キャプチャーモードによっては、WDRを使用できません。
低解像度のキャプチャーモードは、オリジナルの解像度からサンプリングする場合もあれば、オリジナルから切り出す場合もあり、その場合は視野も影響を受けることになります。
どのキャプチャーモードを選択するかは、特定の監視設定でのフレームレートと解像度の要件によって異なります。利用できるキャプチャーモードの仕様については、axis.comで製品のデータシートを参照してください。
リモートフォーカス/ズーム
リモートフォーカス/ズーム機能を使用すると、コンピューターからカメラのフォーカスとズームを調整することができます。カメラの設置場所に行かなくても、シーンのフォーカス、画角、解像度を最適化できる便利な方法です。
プライバシーマスク
プライバシーマスクは、監視領域の一部を隠すユーザー定義のエリアです。ビデオストリームでは、プライバシーマスクは塗りつぶされたブロックまたはモザイク模様として表示されます。
プライバシーマスクは、すべてのスナップショット、録画されたビデオ、ライブストリームに表示されます。
VAPIX®アプリケーションプログラミングインターフェース (API) を使用して、プライバシーマスクを非表示にすることができます。
複数のプライバシーマスクを使用すると、製品のパフォーマンスに影響する場合があります。
複数のプライバシーマスクを作成できます。各マスクには3~10個のアンカーポイントを設定できます。
オーバーレイ
オーバーレイは、ビデオストリームに重ねて表示されます。オーバーレイは、タイムスタンプなどの録画時の補足情報や、製品のインストール時および設定時の補足情報を表示するために使用します。テキストまたは画像を追加できます。
ビデオストリーミングインジケーターは、別のタイプのオーバーレイです。これは、ライブビューのビデオストリームが動作中であることを示します。
ストリーミングとストレージ
ビデオ圧縮形式
使用する圧縮方式は、表示要件とネットワークのプロパティに基づいて決定します。以下から選択を行うことができます。
Motion JPEG
Opus音声コーデックを確実にサポートするために、Motion JPEGストリームが常にRTP経由で送信されます。
Motion JPEGまたはMJPEGは、個々のJPEG画像の連続で構成されたデジタルビデオシーケンスです。これらの画像は、十分なレートで表示、更新されることで、連続的に更新される動きを表示するストリームが作成されます。人間の目に動画として認識されるためには、1秒間に16以上の画像を表示するフレームレートが必要になります。フルモーションビデオは、1秒間に30フレーム (NTSC) または25フレーム (PAL) で動画と認識されます。
Motion JPEGストリームは、かなりの帯域幅を消費しますが、画質に優れ、ストリームに含まれるすべての画像にアクセスできます。
H.264またはMPEG-4 Part 10/AVC
H.264はライセンスされた技術です。このAxis製品には、H.264閲覧用のクライアントライセンスが1つ添付されています。ライセンスされていないクライアントのコピーをインストールすることは禁止されています。ライセンスを追加購入するには、Axisの販売代理店までお問い合わせください。
H.264を使用すると、画質を損なうことなく、デジタル映像ファイルのサイズを削減でき、Motion JPEG形式の場合と比較すると80%以上、従来のMPEG形式と比較すると50%以上を削減できます。そのため、ビデオファイルに必要なネットワーク帯域幅やストレージ容量が少なくなります。また、別の見方をすれば、より優れた映像品質が同じビットレートで得られることになります。
H.265またはMPEG-H Part 2/HEVC
H.265を使用すると、画質を損なうことなくデジタルビデオファイルのサイズを削減でき、H.264に比べて25%以上縮小することができます。
- H.265はライセンスされた技術です。このAxis製品には、H.265閲覧用のクライアントライセンスが1つ添付されています。ライセンスされていないクライアントのコピーをインストールすることは禁止されています。ライセンスを追加購入するには、Axisの販売代理店までお問い合わせください。
- ほとんどのWebブラウザはH.265のデコードに対応していないため、カメラはWebインターフェースでH.265をサポートしていません。その代わり、H.265のデコーディングに対応した映像管理システムやアプリケーションを使用できます。
画像、ストリーム、およびストリームプロファイルの各設定の相互関連性について
[Image (画像)] タブには、製品からのすべてのビデオストリームに影響を与えるカメラ設定が含まれています。このタブで変更した内容は、すべてのビデオストリームと録画にすぐに反映されます。
[Stream (ストリーム)] タブには、ビデオストリームの設定が含まれています。解像度やフレームレートなどを指定せずに、製品からのビデオストリームを要求している場合は、これらの設定が使用されます。[Stream (ストリーム)] タブで設定を変更すると、実行中のストリームには影響しませんが、新しいストリームを開始したときに有効になります。
[Stream profiles (ストリームプロファイル)] の設定は、[Stream (ストリーム)] タブの設定よりも優先されます。特定のストリームプロファイルを持つストリームを要求すると、ストリームにそのプロファイルの設定が含まれます。ストリームプロファイルを指定せずにストリームを要求した場合、または製品に存在しないストリームプロファイルを要求した場合、ストリームに [Stream (ストリーム) タブの設定が含まれます。
ビットレート制御
ビットレート制御で、ビデオストリームの帯域幅の使用量を管理することができます。
可変ビットレート (VBR)
可変ビットレートでは、シーン内の動きのレベルに基づいて帯域幅の使用量が変化します。シーン内の動きが多いほど、多くの帯域幅が必要です。ビットレートが変動する場合は、一定の画質が保証されますが、ストレージのマージンを確認する必要があります。
最大ビットレート(MBR)
最大ビットレートでは、目標ビットレートを設定してシステムのビットレートを制限することができます。瞬間的なビットレートが指定した目標ビットレート以下に保たれていると、画質またはフレームレートが低下することがあります。画質とフレームレートのどちらを優先するかを選択することができます。目標ビットレートは、予期されるビットレートよりも高い値に設定することをお勧めします。これにより、シーン内で活動レベルが高い場合にマージンを確保します。
- 目標ビットレート
平均ビットレート(ABR)
平均ビットレートでは、より長い時間スケールにわたってビットレートが自動的に調整されます。これにより、指定した目標を達成し、使用可能なストレージに基づいて最高画質のビデオを得ることができます。動きの多いシーンでは、静的なシーンと比べてビットレートが高くなります。平均ビットレートオプションを使用すると、多くのアクティビティがあるシーンで画質が向上する可能性が高くなります。指定した目標ビットレートに合わせて画質が調整されると、指定した期間 (保存期間)、ビデオストリームを保存するために必要な総ストレージ容量を定義できます。次のいずれかの方法で、平均ビットレートの設定を指定します。
必要なストレージの概算を計算するには、目標ビットレートと保存期間を設定します。
使用可能なストレージと必要な保存期間に基づいて平均ビットレートを計算するには、目標ビットレートカリキュレーターを使用します。
- 目標ビットレート
- 実際の平均ビットレート
- 平均ビットレートオプションの中で、最大ビットレートをオンにし、目標ビットレートを指定することもできます。
- 目標ビットレート
- 実際の平均ビットレート
エッジツーエッジ技術
エッジツーエッジは、IP装置が相互に直接通信できるようにする技術です。たとえば、AxisのカメラとAxisの音声/レーダー製品との間のスマートペアリング機能を提供します。
ペアリングされたデバイスが同じAXIS OSバージョンで動作していることを確認してください。
詳しくは、whitepapers.axis.com/edge-to-edge-technology でホワイトペーパー“Edge-to-edge technology”(エッジツーエッジ技術) を参照してください。
スピーカーのペアリング
エッジツーエッジのスピーカーペアリングにより、対応するAxisネットワークスピーカーをカメラの一部であるかのように使用できます。ペアリングすると、スピーカーの機能はカメラのwebインターフェースに統合され、ネットワークスピーカーは音声出力装置として機能し、音声クリップを再生したり、カメラを介して音声を送信したりすることができます。
カメラはVMSで音声出力を内蔵したカメラであると識別され、再生された音声をスピーカーにリダイレクトします。
ネットワークペアリング
エッジツーエッジのネットワークペアリングを使用すると、カメラをライトとサイレン機能を備えた互換性のあるAxisデバイスに接続し、その統合機能を利用することができます。
分析機能とアプリ
分析機能とアプリを使用することで、Axisデバイスをより活用できます。AXIS Camera Application Platform (ACAP) は、サードパーティによるAxisデバイス向けの分析アプリケーションやその他のアプリの開発を可能にするオープンプラットフォームです。アプリとしては、デバイスにプリインストール済み、無料でダウンロード可能、またはライセンス料が必要なものがあります。
Axisの分析機能とアプリのユーザーマニュアルは、help.axis.comから参照できます。
- 同時に複数のアプリケーションを実行できますが、互いに互換性がないアプリケーションもあります。アプリケーションの特定の組み合わせによっては、並行して実行すると過度の処理能力やメモリーリソースが必要になる場合があります。展開する前に、各アプリを組み合わせて実行できることを確認してください。
AXIS Object Analytics
AXIS Object Analyticsは、カメラにあらかじめ組み込まれている分析アプリケーションです。AXIS Object Analyticsは、シーン内で動く物体を検知し、人や車両などとして分類します。さまざまなタイプの物体にアラームを送信するようにアプリケーションを設定できます。アプリケーションの動作の詳細については、AXIS Object Analyticsユーザーマニュアルを参照してください。
AXIS Image Health Analytics
AXIS Image Health AnalyticsはAIベースのアプリケーションで、画像の劣化や(カメラに対する)いたずらの検知に使用できます。このアプリケーションは、シーンの挙動を分析・学習し、画像のぼやけや露出不足を検知したり、視界の遮蔽や方向転換を検知したりします。アプリケーションを設定して、これらの検知に対してイベントを送信し、カメラのイベントシステムまたはサードパーティ製ソフトウェアでアクションをトリガーできます。
アプリケーションの仕組みに関するより詳しい情報については、AXIS Image Health Analyticsのユーザーマニュアルを参照してください。
メタデータの可視化
分析メタデータは、シーン内の動く物体に使用できます。サポートされている物体クラスが、物体のタイプと分類の信頼度に関する情報と共に、物体を囲む境界ボックスにより、ビデオストリームに可視化されます。分析メタデータの設定および使用方法の詳細については、AXIS Scene Metadata統合ガイドを参照してください。
サイバーセキュリティ
サイバーセキュリティに関する製品固有の情報については、axis.comの製品データシートを参照してください。
AXIS OSのサイバーセキュリティの詳細情報については、『AXIS OS強化ガイド』を参照してください。
署名付きOS
署名付きOSは、ソフトウェアベンダーがAXIS OSイメージを秘密鍵で署名することで実装されます。オペレーティングシステムに署名が付けられると、装置はインストール前にソフトウェアを検証するようになります。装置でソフトウェアの整合性が損なわれていることが検出された場合、AXIS OSのアップグレードは拒否されます。
セキュアブート
セキュアブートは、暗号化検証されたソフトウェアの連続したチェーンで構成される起動プロセスで、不変メモリ (ブートROM) から始まります。署名付きOSの使用に基づいているため、セキュアブートを使うと、装置は認証済みのソフトウェアを使用した場合のみ起動できます。
Axis Edge Vault
ハードウェアベースのサイバーセキュリティプラットフォーム「Axis Edge Vault」により、Axisデバイスを保護することができます。装置のIDと整合性を保証し、不正アクセスから機密情報を保護する機能を提供します。これは、エッジデバイスセキュリティに関する専門知識を駆使して、暗号コンピューティングモジュール(セキュアエレメントやTPM)とSoCセキュリティ(TEEやセキュアブート)に基づき構築された強力な基盤により成り立っています。
TPMモジュール
TPM (トラステッドプラットフォームモジュール) は、不正アクセスから情報を保護するための暗号化機能を提供するコンポーネントです。常に有効になっていて、変更できる設定はありません。
AxisデバイスID
デバイスIDの信頼性を確立するには、デバイスの出所を確認できることが鍵となります。Axis Edge Vaultを搭載したデバイスには、生産工程で、工場でプロビジョニングされ、国際規格(IEEE 802.1AR)に準拠した一意のAxisデバイスID証明書が割り当てられます。これがデバイスの出所を証明するパスポートのような役割を果たします。デバイスIDは、Axisルート証明書により署名された証明要素として、セキュリティで保護されたキーストアに安全かつ永続的に格納されます。お客様のITインフラストラクチャーでデバイスIDを活用し、装置のセキュアな自動化オンボーディングや、装置のセキュアな識別に役立てることができます。
署名付きビデオ
署名付きビデオにより、ビデオファイルの管理のチェーンを証明することなく、映像の証拠が改ざんされていないことを確認できるようになります。セキュリティで保護されたキーストアに安全に格納されている独自のビデオ署名キーにより、各カメラのビデオストリームに署名が追加されます。ビデオを再生する際に、ビデオが改ざんされていないかどうかがファイルプレーヤーに表示されます。ビデオに署名が付いていることで、映像を元のカメラまで遡って追跡し、映像がカメラから出た後に改ざんされていないことを確認することが可能となります。
Axis装置のサイバーセキュリティ機能の詳細については、axis.com/learning/white-papersにアクセスし、サイバーセキュリティを検索してください。
仕様
製品概要
- ウェザーシールド
- ウィンドウ
- レーダー
- 光センサー
- 赤外線照明LED
- 光学ユニット
- ケーブルカバー
- 侵入アラームセンサー
- 安全ワイヤー
- 侵入アラームマグネット
ケーブルカバーを付けたまま本製品を持ち上げないでください。
- I/Oコネクター
- RS485/422コネクター
- 電源コネクター
- ネットワークコネクタ (PoE)
- microSDカードスロット
- 音声出力
- 音声入力
- ステータスLED
- コントロールボタン
- ケーブルガスケットM20 (×2)
LEDインジケーター
- ステータスLEDは、イベントの発生時に点滅させることができます。
- ケーシングを閉じると、LEDは消灯します。
| ステータスLED | 説明 |
| 消灯 | 接続時および正常動作時です。 |
| 緑 | 起動後正常に動作する場合、10秒間、緑色に点灯します。 |
| オレンジ | 起動時に点灯し、装置のソフトウェアのアップグレード中、または工場出荷時の設定にリセット中に点滅します。 |
| オレンジ/赤 | ネットワーク接続が利用できないか、失われた場合は、オレンジ色/赤色で点滅します。 |
| 赤 | 装置のソフトウェアのアップグレードに失敗しました。 |
ブザー
フォーカスアシスタントのブザー信号
オプションのPアイリスレンズ、DCアイリスレンズ、または手動アイリスレンズでのみ有効です。
| ブザー | レンズ |
|---|---|
| 短い間隔 | 最適に調節されています |
| 中程度の間隔 | もう少しで最適になります |
| 長い間隔 | 適切に調節されていません |
SDカードスロット
本装置は、microSD/microSDHC/microSDXCカードに対応しています。
推奨するSDカードについては、axis.comを参照してください。
![]()
![]()
![]() microSD、microSDHC、およびmicroSDXCロゴは、SD-3C LLCの商標です。microSD、microSDHC、microSDXCは、米国および/または他の国々におけるSD-3C, LLCの商標または登録商標です。
microSD、microSDHC、およびmicroSDXCロゴは、SD-3C LLCの商標です。microSD、microSDHC、microSDXCは、米国および/または他の国々におけるSD-3C, LLCの商標または登録商標です。
ボタン
コントロールボタン
- コントロールボタンは、以下の用途で使用します。
製品を工場出荷時の設定にリセットする。工場出荷時の設定にリセットするを参照してください。
インターネット経由でワンクリッククラウド接続 (O3C) サービスに接続します。接続するには、ボタンを押してから放し、ステータスLEDが緑色に3回点滅するまで待ちます。
侵入アラームスイッチ
侵入警告スイッチを使用して、誰かが装置のハウジングを開いたときに通知を受け取ることができます。スイッチがアクティブになったときに装置がアクションを実行するようにするためのルールを作成します。囲いが開かれたときに通知をトリガーするを参照してください。
コネクター
ネットワーク コネクター
Power over Ethernet Plus (PoE+) 対応RJ45イーサネットコネクター
音声コネクター
音声入力 - モノラルマイクロフォンまたはラインインモノラル信号用 (左チャンネルはステレオ信号で使用) 3.5 mm入力。
音声入力 - デジタルマイクロフォン、アナログモノラルマイクロフォンまたはラインインモノラル信号用 (左チャンネルはステレオ信号で使用) 3.5 mm入力。
音声出力 - 3.5 mm音声 (ラインレベル) 出力 (パブリックアドレス (PA) システムまたはアンプ内蔵アクティブスピーカーに接続可能)。音声出力には、ステレオコネクタを使用する必要があります。
音声入力
| 1 チップ | 2 リング | 3 スリーブ |
アンバランス型マイクロフォン (エレクトレット電源あり、なし) またはライン入力 | 選択されている場合、エレクトレット電源 | アース |
バランス型マイクロフォン (ファントム電源あり、なし) またはライン入力、「ホット」信号 | バランス型マイクロフォン (ファントム電源あり、なし) またはライン入力、「コールド」信号 | アース |
デジタル信号 | 選択されている場合、リング電源 | アース |
音声出力
| 1 チップ | 2 リング | 3 スリーブ |
チャンネル1、アンバランス型ライン、モノラル | チャンネル1、アンバランス型ライン、モノラル | アース |
I/Oコネクター
I/Oコネクターに外部装置を接続し、動体検知、イベントトリガー、アラーム通知などと組み合わせて使用することができます。I/Oコネクターは、0 VDC基準点と電力 (12 V DC出力) に加えて、以下のインターフェースを提供します。
- デジタル入力
- 開回路と閉回路の切り替えが可能な装置 (PIRセンサー、ドア/窓の接触、ガラス破損検知器など) を接続するための入力です。
- 状態監視入力
- デジタル入力のいたずらを検知する機能が有効になります。
- デジタル出力
- リレーやLEDなどの外部装置を接続します。接続された装置は、VAPIX®アプリケーションプログラミングインターフェースを通じたイベントまたは本装置のwebインターフェースから有効にすることができます。
6ピンターミナルブロック
| 機能 | ピン | メモ | 仕様 |
| DCアース | 1 | 0 VDC | |
| DC出力 | 2 | 補助装置の電源供給に使用できます。 | 12VDC 最大負荷 = 50 mA |
| 設定可能 (入力または出力) | 3–6 | デジタル入力/状態監視 – 動作させるにはピン1に接続し、動作させない場合はフロート状態 (未接続) のままにします。状態監視を使用するには、終端抵抗器を設置します。抵抗器を接続する方法については、接続図を参照してください。 | 0~30 VDC (最大) |
| デジタル出力 – アクティブ時はピン1 (DCアース) に内部で接続し、非アクティブ時はフロート状態 (未接続) になります。リレーなどの誘導負荷とともに使用する場合は、過渡電圧から保護するために、負荷と並列にダイオードを接続します。 | 0~30 VDC (最大)、オープンドレイン、100 mA |
例
- DCアース
- DC出力12 V、最大50 mA
- I/O (状態監視として設定)
- I/O (出力として設定)
- 設定可能I/O
- 設定可能I/O
電源コネクター
DC電源入力用2ピンターミナルブロック。定格出力が100 W以下または5 A以下の安全特別低電圧 (SELV) に準拠した有限電源 (LPS) を使用してください。
RS485/RS422コネクター
RS485/RS422シリアルインターフェース用2ピンターミナルブロック×2。
シリアルポートの設定により、次のモードをサポート可能。
2ワイヤーRS485半二重
4ワイヤーRS485全二重
2ワイヤーRS422単方向
4ワイヤーRS422全二重ポイントツーポイント通信
機能 | メモ |
RS485/RS422 TX(A) | RS422および4ワイヤーRS485のTXペア |
RS485/RS422 TX(B) | |
RS485A5またはRS485/422 RX(A) | すべてのモードのRXペア (2ワイヤーRS485のRX/TXペア) |
RS485BまたはRS485/422 RX(B) |
トラブルシューティング
工場出荷時の設定にリセットする
![]() 本製品は有害な光を放射することがあります。眼に有害となる可能性があります。動作ランプを凝視しないでください。
本製品は有害な光を放射することがあります。眼に有害となる可能性があります。動作ランプを凝視しないでください。
工場出荷時の設定へのリセットは慎重に行ってください。工場出荷時の設定へのリセットを行うと、IPアドレスを含むすべての設定が工場出荷時の値にリセットされます。
本製品を工場出荷時の設定にリセットするには、以下の手順に従います。
本製品の電源を切ります。
コントロールボタンを押した状態で電源を再接続します。製品概要を参照してください。
ステータスLEDインジケーターがオレンジで点滅するまでコントロールボタンを15~30秒間押し続けます。
コントロールボタンを放します。プロセスが完了すると、ステータスLEDが緑色に変わります。ネットワーク上にDHCPサーバーがない場合、装置のIPアドレスのデフォルトは次のいずれかになります。
AXIS OS 12.0以降の装置: リンクローカルアドレスサブネット(169.254.0.0/16)から取得
AXIS OS 11.11以前の装置: 192.168.0.90/24
インストールおよび管理ソフトウェアツールを使用して、IPアドレスの割り当て、パスワードの設定、装置へのアクセスを行います。
axis.com/supportのサポートページに、インストールおよび管理ソフトウェアツールが用意されています。
装置のwebインターフェースを使用して、各種パラメーターを工場出荷時の設定に戻すこともできます。[Maintenance (メンテナンス) > Factory default (工場出荷時の設定)] に移動し、[Default (デフォルト)] をクリックします。
AXIS OSのオプション
Axisは、アクティブトラックまたは長期サポート (LTS) トラックのどちらかに従って、装置のソフトウェアの管理を提供します。アクティブトラックでは、最新の製品機能すべてに常時アクセスできますが、LTSトラックの場合、バグフィックスやセキュリティ更新に重点を置いた定期的リリースが提供される固定プラットフォームを使用します。
最新の機能にアクセスする場合や、Axisのエンドツーエンドシステム製品を使用する場合は、アクティブトラックのAXIS OSを使用することをお勧めします。最新のアクティブトラックに対して継続的な検証が行われないサードパーティの統合を使用する場合は、LTSトラックをお勧めします。LTSにより、大きな機能的な変更や既存の統合に影響を与えることなく、サイバーセキュリティを維持することができます。Axis装置のソフトウェア戦略の詳細については、axis.com/support/device-softwareにアクセスしてください。
AXIS OSの現在のバージョンを確認する
装置の機能はAXIS OSによって決まります。問題のトラブルシューティングを行う際は、まずAXIS OSの現在のバージョンを確認することをお勧めします。最新バージョンには、特定の問題の修正が含まれていることがあります。
AXIS OSの現在のバージョンを確認するには:
装置のwebインターフェース > [Status (ステータス)] に移動します。
[Device info (デバイス情報)] で、AXIS OSのバージョンを確認します。
AXIS OSをアップグレードする
- デバイスソフトウェアのアップグレードでは、既定の設定とカスタマイズ設定が保存されます。Axis Communications ABは、新しいAXIS OSバージョンで機能が利用可能であっても、設定が保存されることを保証できません。
- AXIS OS 12.6以降、お使いのデバイスの現在のバージョンからアップグレードバージョンまでのすべてのLTSバージョンをインストールする必要があります。たとえば、現在インストールされているデバイスソフトウェアのバージョンがAXIS OS 11.2の場合、デバイスをAXIS OS 12.6にアップグレードする前に、LTSバージョンであるAXIS OS 11.11をインストールする必要があります。詳しくは、AXIS OS Portal: アップグレードパスを参照してください。
- アップグレードプロセス中は、装置を電源に接続したままにしてください。
- アクティブトラックのAXIS OSの最新バージョンで装置をアップグレードすると、製品に最新機能が追加されます。アップグレードする前に、AXIS OSと共に提供されるアップグレード手順とリリースノートを必ずお読みください。AXIS OSの最新バージョンとリリースノートについては、axis.com/support/device-softwareにアクセスしてください。
AXIS OSのファイルをコンピューターにダウンロードします。これらのファイルはaxis.com/support/device-softwareから無料で入手できます。
デバイスに管理者としてログインします。
[Maintenance (メンテナンス)] >[AXIS OS upgrade (AXIS OSのアップグレード)] に移動し、[Upgrade (アップグレード)] をクリックします。
- アップグレードが完了すると、製品は自動的に再起動します。
技術的な問題と解決策
AXIS OSのアップグレード時の問題
AXIS OSアップグレード失敗 アップグレードに失敗した場合、装置は前のバージョンを再度読み込みます。最も一般的な理由は、AXIS OSの間違ったファイルがアップロードされた場合です。装置に対応したAXIS OSのファイル名であることを確認し、再試行してください。 |
AXIS OSのアップグレード後の問題 アップグレード後に問題が発生する場合は、[Maintenance (メンテナンス)] ページから、以前にインストールされたバージョンにロールバックします。 |
IPアドレスの設定で問題が発生する
IPアドレスを設定できない
|
デバイスへのアクセスの問題
ブラウザからデバイスにアクセスする際、ログインできない HTTPSが有効になっている場合、ログインを試行するときに正しいプロトコル (HTTPまたはHTTPS) を使用していることを確認します。場合によっては、ブラウザのアドレスフィールドに手動で rootアカウントのパスワードを忘れた場合は、デバイスを工場出荷時の設定にリセットする必要があります。手順については、工場出荷時の設定にリセットするを参照してください。 |
DHCPによってIPアドレスが変更された DHCPサーバーから取得したIPアドレスは動的なアドレスであり、変更されることがあります。IPアドレスが変更された場合は、AXIS IP UtilityまたはAXIS Device Managerを使用してデバイスのネットワーク上の場所を特定してください。デバイスのモデルまたはシリアル番号、あるいはDNS名 (設定されている場合) を使用してデバイスを識別します。 必要に応じて、静的なIPアドレスを手動で割り当てることができます。手順については、axis.com/supportにアクセスしてください。 |
IEEE 802.1X使用時の証明書エラー 認証を正しく行うには、Axisデバイスの日付と時刻をNTPサーバーと同期させなければなりません。[System (システム) > Date and time (日付と時刻)] に移動します。 |
ブラウザがサポートされていません 推奨ブラウザの一覧は、ブラウザーサポートを参照してください。 |
外部からデバイスにアクセスできません 装置に外部からアクセスする場合は、以下のいずれかのWindows®向けアプリケーションを使用することをお勧めします。
手順とダウンロードについては、axis.com/vmsにアクセスしてください。 |
MQTTの問題
MQTTオーバSSLを使用してポート8883経由で接続できない ファイアウォールは、ポート8883を使用する通信を安全ではないとみなし、ブロックします。 場合によっては、サーバー/ブローカーによってMQTT通信用に特定のポートが提供されていない可能性があります。この場合でも、HTTP/HTTPSトラフィックに通常使用されるポート経由でMQTTを使用できる場合もあります。
|
デバイスの動作に関する問題
フロントヒーターとワイパーが作動していない フロントヒーターまたはワイパーがオンにならない場合は、上部カバーがハウジングユニットの底部に正しく固定されているか確認してください。 |
このページで解決策が見つからない場合は、axis.com/supportのトラブルシューティングセクションに記載されている方法を試してみてください。
| レーダービデオ融合の問題 | |
境界ボックスが物体を正確にカバーしていない | ビデオ分析検知を使わない場合、カメラは画像内のレーダー検知の投影を表示しており、ビデオ分析境界ボックスほど正確ではありません。また、傾斜した道路、山、くぼみなど、シーンの高低差が原因の可能性もあります。 ボックスが高すぎるまたは低すぎる場合は、取り付け高さが正しく設定されていることを確認します。また、自動キャリブレーション機能を使用して、境界ボックスの精度を向上させることもできます。自動キャリブレーションを使用するには、[Radar > Autocalibration (レーダー > 自動キャリブレーション)] に移動します。 |
境界ボックスに1人が表示されているが、実際には2人いる | 2人が一緒に歩いており、レーダーでのみ検知される場合、1人として分類され、境界ボックスは1つしか表示されません。分析融合ゾーンに入ると、正確に分類されます。 |
物体を追跡する際に境界ボックスの位置が変わる | レーダーとカメラの分析機能の両方によって同じ物体が検知される場合や、カメラの分析によってのみ物体が検知される場合、境界ボックスはカメラ情報を使用して物体の周囲にしっかりと引き寄せられます。 ビデオ検知が失われた場合、境界ボックスはレーダー投影の位置に引き寄せられ、精度が低くなります。ビデオ検知を再度選択すると、境界ボックスが正しい位置に再び描画されます。 また、自動キャリブレーション機能を使用して、境界ボックスの精度を向上させることもできます。自動キャリブレーションを使用するには、[Radar > Autocalibration (レーダー > 自動キャリブレーション)] に移動します。 |
マニュアルに記載されているとおりの検知距離が得られない |
|
誤報を最小限に抑える方法は? |
|
レーダー干渉 | 本装置は、2つのレーダーチャンネルの片方を使用します。各チャンネル内では、最大4台のレーダーが、その周波数の使用に関する最適な方法についてネゴシエーションを行います。この機能を使用しても、カメラからの干渉に関する警告メッセージが表示される場合があります。その場合、装置ごとにチャンネルを手動で選択できます。 物理的に互いに近い装置は、同じチャンネルに設定する必要があります。これにより、装置の干渉が避けやすくなります。 |
パフォーマンスに関する一般的な検討事項
考慮すべき最も重要な要因:
貧弱なインフラによるネットワークの使用率が高いと帯域幅に影響します。
サポートに問い合わせる
さらにサポートが必要な場合は、axis.com/supportにアクセスしてください。